Transcripts
1. Course Introduction: Hello and welcome
everyone to the form finding with kangaroo
physics course, my name is Whatsapp. I'm missing architect, parametric designer
and BIM Manager. With many years of
experience using a teaching 3D modeling software
and parametric tools. My first experience with
kangaroo physics and grasshopper was during my
master's degree in the USA. I have been since using parametric tools
on a daily basis, solving complex
geometric problems and streamline strategy, and providing early
design solutions while combining them with BIM
using Rhino inside Revit, as well as other
parametric tools. My teaching passion found its way first at
the FabLab Berlin, as well as other
design companies, institutions and universities
in Germany and Europe. Participants from all
over the world with various design
backgrounds joined my courses and benefited tremendously from them
and are able to implement their knowledge in their studies
and professional career. The course is divided
into eight units, starting from beginner
to advanced levels, you will learn not only what
kangaroo physics can do, but also how to use it as
digital lab simulator or forms with real-life case
studies of notable projects, including Friar arrows,
the inside membrane, and Heinz East layers, thin concrete shells,
as well as how to simulate origami
patterns and much more. The total length of the
course is around 10 h. I highly recommend
practicing daily, since the best way of
learning it is by doing, making mistakes along the way, understanding how it works and learning from that
to reach new levels. You will be able to download
all the course files that include detailed
explanations as well as all the components, practical examples
and exercises. Whether you are an architect, engineer from all fields. It is added from all fields, including but not limited
to product design, jewelry design, fashion
design, graphic design, or a student of these fields, kangaroo physics would
be a great addition to your toolbox and it will push your design abilities
to a whole new level. Alright? If you want
to learn how to use this amazing parametric
platform that on board. And let's get started.
2. Understanding the difference between Form Making vs Form Finding: Hello and welcome
everyone to the form finding course with
kangaroo physics. In this course are going to learn more about
kangaroo physics, which is a plug-in
to grasshopper, which is itself a plugin
to our restaurants 3D. So kangaroo physics
actually includes a lot of interesting tools and components that would help us find forums
parametrically speaking. Now, before diving deep into it, I'm going to first show you
the structure of the course, which is composed of units. And you have already
access to these files. And so for every unit, we have a rhinoceros file around a file as well as the
grasshopper file. And inside of each
grasshopper file, there are the parametric
definitions that includes the kangaroo components and elements that are accelerated to the definitions themselves. Now, before starting
with Unit one, please allow me to explain
briefly about form finding. And what is it exactly about? I will open now
this folder here. Alright. So first of all, there are two main
design principles in architecture and engineering
and in other disciplines. There is the form making
and form finding. With form-making
already have an idea. The general idea about
what we already have, a certain shape or a
picture, our imagination. And we simply want to draw it to make a quick
sketch out of it. So the knowns with the
form-making would be the general shape and an initial
number of elements, e.g. and then for the unknowns,
on the other hand, are dimensions of
the elements there, thicknesses, they
cross sections, etc. Usually we start
with a sketch of lines to form a basic shape. And afterwards we
start developing sketch by defining certain
thicknesses and dimensions. And then after that, we search about the loads and forces involved in order
to know what is required. What is the materiality
of each element? Is it made out of
concrete or steel, or is it a wooden beam, etc. That is how we develop the design in order to reach the final shape
of the geometry. However, with form finding, there is no given form or shape. So we cannot simply
start drawing anything before because we
don't have the form yet. So it's basically the
opposite of form-making. With form finding. The knowns are the positions
of the supports or anchoring points or elements
as an initial idea, the loads or weights involved, and the materiality
of the geometry. So the unknown with form
finding is the form itself. Alright? So knowing the basic difference between form-making and form, finding, the traditional
drawing tools in architecture, engineering, and
other disciplines. The drawing tools
that are used in both analog and
digital methods are no longer helpful or applicable. Like using the pen if
sketching by hand, or using the cursor of
sketching digitally. Such tools are good
with form-making. We use them to draw
the forms of objects, but you cannot use them now
to find forms of objects. With form finding binaries
in that field need, needed and used to Hank
chains or they used to hang membranes in
order to find the forms. They did not initially
start with a sketch. So instead of sketching
objects with a pen, they replaced the pen
with study models. So they will start with a model that is fixed to
certain base, e.g. it will be made out of maybe metal chains or a
certain memory membrane. And they would find the form with the help
of such study models. And then they would
draw it afterwards. So it is an inverted
process where the starting point is the model itself and not a sketch drawing. During the webinar,
we're going to visit some case studies of
a couple of pioneers in the field of form finding like Heinz easily and Frei Otto. And we're going to replicate a few projects using
Kangaroo physics. I'm going to show
you an example of form making. This image. We see a concrete bridge. This bridge as a result of form making and
not form finding. Let's observe the
elements of this bridge. Understand why it is the
result of form-making. So first of all, we
start with a deck. You can see this
concrete deck element that supports the vehicles. This is the main
element of the bridge. We know that we want it to be there because of
connecting two points, for instance, two
holes in this case. And then here it looks like
there is like another road and then another also really
like a small river. Maybe. We know that we cannot have the column on that lower
road and in the water. You also know that we need
a number of elements, the number of columns
that support the deck. Basically. We place them with
initial spacing layout. This is the initial sketch of
the bridge and form making. And then after that, we start
developing the elements, researching as the amount of vehicles traveling on
the bridge per second, what loads are to be
expected on the bridge, accounting for potential
rain and snow, etc. Then based on this information, we start developing the
cross-section of the deck. The thicknesses of the
beams are required to hold it if thickness
of the columns, etc.. And so with this method, the design is developed knowing that first the
location of the deck, the height of the columns, preliminary spacing
that we consider avoiding the lower river
and road and the river. The general shape or
form is already known, but not detailed yet to
be structurally working. Now I'm going to close this
picture and open this one. Here we can see one of Gaudi's iconic Sagrada Familia
cathedrals study model. The model is Bay is built
by using weight bags. There. The way that you present the
loads that are hanging from above an anchor to support
points at certain points. In this case, the
model now is inverted, basically that's how it is. And the weight bags
are pulled down by gravity forming inverted
catenary arches. Now if we flip the
image, let's look, check out how it would
actually look like this. How is going to look like? This is the resultant
reversed building. You can see the
arches. On the left. You can see an image that
is taken looking upwards. And you can see that the
columns are not straight, but they look more bending. The columns are actually
following the shape that was given by the inverted model. It is a direct result
of this model. I'm going to bring it back to the original orientation
of the image. This is another example
of gallery study models, where we can see the kitchen
arches that are formed by the hanging chains without
using the weight bags. So the form is found using only the chains and
the support points. If I now rotate it, this is how the building
would look like. So there are two quick, so these are two quick examples showing Gowdy's form
finding strategies. Let's look at some of
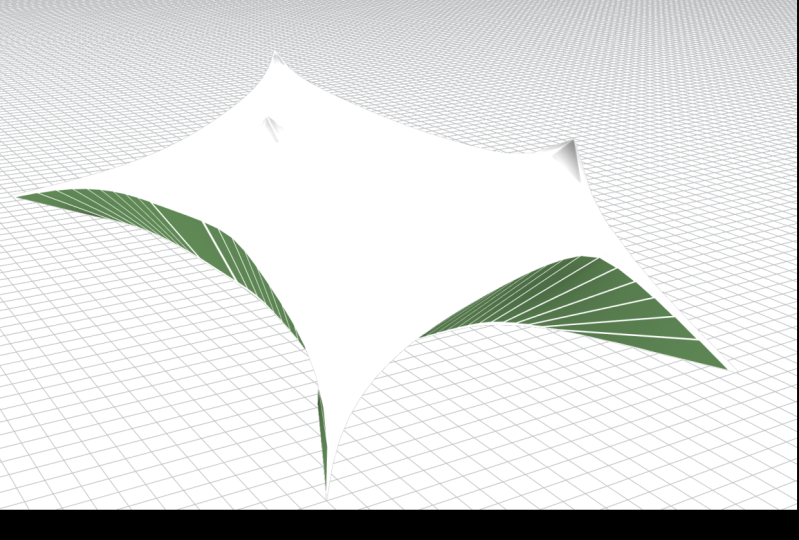
Heinz Easterners examples. This is an interesting
image showing the process of finding the form of a concrete shell structure
using this model basically, you can see here the
anchor points or the support points
that then the shape. He uses a tensile membrane
and plaster which we presented the concrete shell and mimic the concrete behavior. Then afterwards we get
the resulting shape. The shape, which
can then be drawn. So we don't start
with a drunk sketch, but rather with the model. The sketch model
basically that leads to the shape of the
geometry itself. Once having found this shape, then it can be drawn
on paper or digitally, and then extract the
respective sections and then plants, etc. Now, having had a brief overview of both design approaches, I would like to quickly talk
about the Roman arch and its relation with the
topic of form finding. The Roman arch is
actually based on this semicircle, this
perfect semicircle. So we start with the drawing, we start with this shape
and then we'll reinforce the built Arch with
walls and buttresses. You can see here the
direction of the loads and then the function of the wall prevents
it from collapsing. So just to make it work here, the starting point of the
drawing and designing the Roman arch is first the
shape, a perfect semicircle. And then afterwards
we develop it, making the loads and we're
forcing it with supporting elements such as the
wall and or buttresses. However, the opposite of this design principle informed finding is the catenary arch. So we'll actually start
with the simple chain, which is hanging
under its own weight. Basically. It's only supported at
its ends and it's made of elements that can rotate without any bending resistance. It is just hanging
freely downwards. And this will actually give
us an optimized arch shape. I'm using this optimized shape. Then we can flip it
to find the form, which is in this case
the catenary arch. The benefits of
finding the form of the catenary arch is that it
reduces the bending moment, which is usually preferable
by structural engineers. And also uses materials
in an optimal way, reducing the use of unnecessary material and thus saving on both
material and costs. So in comparison
with the Roman arch, there is material that is added, adding a structural backing
in order to make it work. To make the arch
stand while having the perfect arch or semicircle. However, with the catenary arch, there is no need for
additional material as the shape supports
itself with compression, as it is, as we have it now. So this is a quick
explanation showing the difference between
the Roman arch and the catenary arch. And why are they
different shape and how that affects later
on the building process. So I just wanted to have this
quick introduction about form-making versus form finding before we dive in kangaroo. And also, I found this interesting image while researching and finding
materials for the course. In our daily life, we often pass my examples
of catering arches. This is a simple example of
a catenary arch chain that's supported by two poles and hanging under the load
of its own weight. Basically, the chain connections are not subject to any bending, but they can only rotate freely. So this is the resting result of the catenary arch or chain. You see it is not forming
a circle like that of the Roman arch
because the points are spread out that much
and we just get this shape out of because
of that actually. Alright. What else? We're going to look
shortly at how Hooke's law is applied
inside of kangaroo. With few examples and
simulations and try to double check those simulations and results with real
physics equations. Alright, so I'm going to
open unit to one Rhino file. Alright, and these
are the latest. Want to extend this a bit? And now let's open
the grasshopper. I'm going to just drag and drop Unit One. Grasshopper file. Can crew introduction.
Alright, so this is unit one. And basically each
grasshopper file has its rhino parent
file and both have the same name so that
you find them easily. And inside of each
grasshopper file, structured by topic
basically here, e.g. in your PT one file we have Hooke's Law inside of
kangaroo than catenary curve, then what about kilograms
and the pendulum swing, etc. So instead of every
grasshopper file, the topics are
highlighted by title and then the explanation is
underneath. And later on. After the webinar,
you can go back to these explanations and
examples and even use them. Check what was
covered, et cetera. You can go back to these
and you can test them, make copies and change them. You can even change this. You can copy this to
the side and then change it and play with
it, tweak it, et cetera. It's for your own
benefit and use later on when you want to
revise any topic. So now we looked at for
making versus form finding. And what's the main difference between these two concepts? Now, what does kangaroo,
how does it work? Kangaroo is a live
physics engine for interactive simulation
from finding optimization with
constant solving. And this is the main website where you can download it from. It is food for rhino.com. And I'm going to open
the upside here. So this is the website where
you can download it from. And it has a lot
of versions like previous versions are
going to actually be using two versions
simultaneously. I've already installed kangaroo 2.42 and can groove
physics 0.099. They are a bit
different and they include mostly similar elements. However, some elements that are in this one can grow physics 0.099 are not included
in the latest one. And also the way it works, slightly different how the
components work together. I'm going to show you
what I mean by this. Once we dive into it. Also, please keep in mind
that kangaroo is not a structural analysis
tool that calculates deformations or stresses
inside of geometries. It is rather similar to
a physics lab where you can simulate the elastic
behavior of geometries, such as cables,
membranes, et cetera, to predict the resultant shape through the form
finding process. So in other words, it will simulate the
equilibrium state of a shape by applying certain
parameters that we set. E.g. gravity forces, anchor
points, wind forces, etc. And then the resulting
shape will be like the funicular geometry
that has reached equilibrium or stability state
under the applied forces. And in order to find
the equilibrium, kangaroo applies Hooke's law to a particle spring
system that we set. I'm going to show you
soon what I mean by that. So note, since Kangaroo does not consider all physical
aspects of objects, like material properties such
as density or elasticity. It is not perfectly precise. Further studies about
the materials properties would be than necessary. What is great though about, about it is that it's very
fast at a free tool that gives you an early draft generation
of funicular geometries. And so what we're
doing in kangaroo is mimicking the work that is similar to Gowdy's studies, e.g. or similar to Heinz
Easterners studies. We don't have the exact
data of this model, e.g. the concrete or
steel reinforcement. What we're trying to
replicate the model by simulating the shape
as an early sketch, as an early shaped study, basically, an early
geometry study. The building itself
is not going to be made out of chains obviously. But this is like a quick model that
will actually show us, predict to us how
the shape would look like by mimicking the
behavior of chains, but now digitally
and not analog way. So I already mentioned about the two versions
of kangaroo from here. Let's check it out. Basically the main difference
between both kangaroo 1.2, I'm going to maximize. Now the window here. I'm going to activate the
type of kangaroo one. Firstly, the organization
of the components. So you can see here under
kangaroos main tab, we have just four sub-tabs. Forces, all the forces
available that you can use. Then kangaroo sub
tab called kangaroo, which includes the
kangaroo simulators, anchor points, and
few other elements. Then we have the mesh sub tab
and the utilities sub tab. While with kangaroo two, now, these forces have been
subdivided into more categories. Like these for structural
studies, beams, rigid bodies. Then here we have angles, then call for co-planar or circular or collinear
constraints, etc. And then we have the
collision sub tab. And here we have a sub
tab for lines or springs, then here for meshes. Then goals on
meaning constraints, elements containing elements are on curves, are meshes, etc. Then we have points,
anchor points, etc. Here, this tab is called main. It includes the main
kangaroo simulators. And here actually we have more simulators than the
previous kangaroo one. In kangaroo one,
we only had two, which are kangaroo physics
and zombie can grow. While in kangaroo two, we have now bouncy solver, soft and hard solver, solver, step solver,
and the zombie solver, as well as the new
grab component, which you are going to use soon. We have here a sub tab
for meshes and utilities. So the first difference is the organization of components. The second one is how the
simulator is actually work.
3. Kangaroo I vs. II & Hooke's Law Part 1: So are going now to look at three examples and show you the difference
between the simulators, between kangaroo one and
Kangaroo to simulators. Alright, I want to try an example as a proof of
concept of Hooke's law, how it works inside of kangaroo. Because I said that kangaroo
is based on Hooke's Law. And it is actually based on it. I mean, it just, it just uses it actually to
make the simulations. So the physics of kangaroo actually work
based on this law. That's what it is. I will zoom here. I took this
passage from this website. So Hooke's law is a principle of physics that states
that the force needed to extend or
compress a spring by some distance is proportional
to the distance. This can be expressed
mathematically as F equal to minus k x, where f is the force
applied to the spring, either in the form
of strain or stress. X is the displacement
of the spring. So much it stretches
with a negative value, demonstrating that
the displacement of the spring one stretched. The k is the spring constant and details just
how stiff it is. This difference of
the sprint basically, this is the diagram, a diagram showing the
spring when it is at rest. And then when a force
F is applied to it, there is stretching one X and one of the force
is applied twice, then rushing to x. This is the basic
definition of Hooke's law. Now let's try to apply
this using Kangaroo. If we were in the lab, would need is real spring
with the real weight. However, let's try now
to see how can you rule, can actually do that for us. But now, virtually example, a 50 newton weight
N is four Newton. And here I'm using a
Newton unit because this is the unit
used in Hooke's law. Basically. And later on, I will also use kilogram. Kilogram is because we're more familiar with kilograms
and not Newtons. We don't usually use the
uterus and the daily life, but these are proportional. And in the case, so here
I'm saying that we have a 50 Newtons weight
connected to a cable. Actually, I would say
spring because I mean, which has a length of 100 mm. This difference
of this spring is five Newton per millimeter. Alright, so these
are the difference. According to Hooke's law, F is equal to minus kx. But I'm taking the negative
out so that we don't confuse ourselves with
negative distances or values. And let's just say
that F is equal to x k. So if we know the following, the force applied
to the spring is 50 Newtons and F is
equal to 50 newtons k. The stiffness of the spring is five in Newtons per millimeter. The length of its
rest is at 100 mm and x is how much it would
actually move is missing. And so based on this equation, F equal to x k, then x is equal to F over k.
So x is equal to F over k, which is equal to 50 newtons divided by five
Newtons per millimeter. And then we end up with 10 mm. We can also use centimeters or meters or any other units. Here. For this example, I'm
using millimeters. And so if I now draw it here, this is the spring. Alright? Now, we need to translate this equation into
kangaroo components. Basically, we have
to extract from this what we understand as components or to find
these components, put them together and then try to simulate that with kangaroo. Result of the equation is 10 mm. So the spring should stretch, be stretched by 10 mm. And so the final length is
going to be 110, right? That's what we get as
from the equation. Now, what are the givens? What do we need to start with M kangaroo in order
to start the simulation? First, we knew that
the spring here, it is attached to
a point basically. So this point is
an anchor point. I will sketch this. We have here a starting point. I'm going to call it a. Alright, that's the first step. We have this spring
itself, okay. We have this geometry here. This one. I'm going
to call it S. And we have the weight. We have 50 Newtons, which is the weight. So we have another point. Let's say this is W for weight. Alright? So we have these
three ingredients for the simulation that
you want to apply. So let's now try to
gather these components. I'm going now to push this back here and
then push this here. Alright? So we need a point. We need first point that is, that represents a, which is, which actually means
that the anchor point, in this case, for this spring we can start
with as a geometry. Now, in Grasshopper,
we can say that it is aligned a simple line. We need a weight. The weight is also
another point. These are the basic ingredients. And then we want to put these together in order to
make the simulation. So what I've done here, I'm going to bring these here. So to build the point, I first use the construct
point component that is coming from vectors. Point, construct
point, this one. I just wanted to say
that actually what happened is that for some reason I wasn't able to see the preview of the
point in front view, but I was able to sit in top or perspective
views if that happens. Because sometimes it may
happen that with kangaroo, we just need to make
a new viewport, basically to solve it,
right-click and select new viewport and set
the view to front, e.g. then now it appears. So this may happen sometimes. Free to solve it. You
can apply this solution. However, I'm not the case. So we said that we have these three ingredients
to start with. I started by making this construction point
and did not give, give it any value for x, y, and z coordinates. I keep it at 000 origin. And I built a line
which is 100 mm. Make sure that your rhino files
units are in millimeters. I move the point with
unit z -100 downwards. So what done is by 100. And then I have the
line as a resultant. So this process, what I'm doing now is to go from a
theory to the geometry, to use this geometry
with kangaroo. And this is called
discretization, which means
transforming geometries into discrete
counterparts basically. So we can now use these ones. Now, once we have the line e.g. which represents the
spring as a first step. The second step, we want now to find components inside
of kangaroo that actually worked
for us to convert the line into a spring or just to consider
it as a spring. I will expand this a bit. Alright, now, using
Kangaroo 0.099, Let's go to this tab. I'm using here. This component, springs from line to create
the Hooke's law springs. This is what I've done here. And let's now check
out the inputs here. For the line. In order to
convert it into a spring, we need this component. So the first input
is the connection, the curve or the line. So a line connecting two points from the
springs to act between. So this is the line,
the stiffness. So remember that
actually in our example, we said that is
stiffness of the spring is five in Newtons
per millimeter. So it is five. We don't need here to add the units newtons
per millimeter, just the value itself five. You can also use a
number of stator or another value input type if you want. That's
really up to you. I'm going to keep the damping at ten as default value
without changing it. Also, the upper cutoff
and the lower cutoff. At plasticity. Going to change any
of these inputs. I will only connect the value
of the length to the line. The rest length,
which is hundred. These are the main ingredients of the starting
point of the spring. It's 100, the rest length, length, the stiffness of it. It's five. And this is a spring, the line which
represents the spring. You don't need to model
the form of the spring itself in 3D camera
understands the line, in this case as a spring. And that's why it makes it, it makes life easier
for you to do that. And that's what actually the name of the
component indicates, the springs from line. So converting lines
and two springs. Now, the first, the first step, now the weight w, The point is actually
the second point, The end point of the line. So we have the line, we have the point here. And then for this, I'm going back to forces. And here I will use
the urinary force. And if we go back to
the width and hover, it says a vector force
acting on a point. That's what it does. Okay, I brought this one here. So this needs a point. So even though in reality it is a sphere, like this example. But in Grasshopper, we're
not going to use a sphere, but just a point, just to represent that weight. And so forth. The point
or using a unit of force. And for the force
input, It's a vector. The vector basically here, I'm using unit Z vector -50 because we said
here that example, it's 50 Newtons weight
is pushing downwards. And so I'm giving it
a negative value -50. Alright? Now, if I did not
give it any input, just free to know as general
knowledge when you check the input in this component
without giving it any value. By default, the force
has a vector of 0x0y and the Z direction. It's -9.8. And this represents the gravity, the gravitational
acceleration force. And by default, it's given
like that as if you want, let's say to apply a force
that would represent an object that is free falling under the
gravitational force only. And also from the website
extracted the definition of the gravitational
acceleration, which is our crops approximately 9.81 m per square seconds. Which means that ignoring the
effects of air resistance, the speed of an object falling
freely will increase by about 9.81 m/s every second. So this is a standard value given with this
component and kangaroo, but we can now
ignore this for now. And in this example, the springs is not free falling, but only has a weight
attached to it, which has a specific
Newton value of 50. Alright, so we have the spring. This one converted the
line geometry bent to kangaroos language,
it kangaroo component. We converted this weight with a unitary force that is done. Now what you are
left, we're left with is the anchor point, and this is the first
starting point. The starting point, I used this point component just like a shortcut and I called
it here anchor point. Okay, So these are the three ingredients that we have to start with to
run this simulation. Now for the simulation, we need the component
that would simulate for us the spring situation. I just got the kangaroo
physics component. And this is it always, as a rule of thumb, flatten the first two inputs, the force objects and the anchor points to make our
work organized, I always also put all of the forces together
with emerge component. I connected these springs from lines and the unit of force. Now the anchor
point with kangaroo 0.099 is not
considered as a force, but already, this simulator
has anchor points input. So just give this anchor
point to the input basically. And so we have now
the two forces. The spring from lines have the properties of springs with a stiffness of five and
Newtons per millimeter. It is not like a normal cable. So this force, this force are given to
the input force objects. The anchor point is connected
to the anchor points. Input settings will not change. I will not eat anything in here. For now, the geometry input, so I hover over it, it says geometry to transform. It is the line, not the
springs, but the line. The original geometry
that we started with. So don't confuse this
with the spring. This is the line, this one. Then the output.
Now we're going to see that it's going to
be like the line here. The particles out are the points that are
given, et cetera. Now this simulation reset, the final input is reset. It needs a Boolean input, either true or false. And so it tells you through to input the setup false
to run the simulation, which means that
simulation reset through. So please don't do anything, just keep it as reset. When I double-click on
this, I will make it false. That will now run the
simulation for me. And I also need this trigger. Right-click. Go to intervals on this one. Select ten milliseconds. You can also change
these later if you want. But I just like, you know, usually use this one. And so we said this, this value and then just click, click and drag from this dark grayish and
onto the Simulate. And then it attaches itself
to the play automatically. I'm going to delete this
one and keep this one. What I'm doing here
is I want to check the length of the
line at the output. So now the geometry output of the simulator is defined
by the geometry input, which is the line itself. Will also have the
particles out output, which includes the
starting and ending points and the resulting line. And I can also make out of them two spheres just as a visual
or graphical presentation. But this is not really
needed for the simulation. And now we can see that
the rest length is 100. So now let's see what happens
when I run this simulation. I will activate the Boolean. You see it's moving downwards. Since I have the panel showing the curve length changing live, it looks like it's
reaching 100.999, 110. So this is what we expected
from this equation. Based on Hooke's law. Given this information,
the spring, the length, the
weight applied to it, the stiffness of it. We get this result, the final length being 110. So this is basically a proof of concept that kangaroo
physics now is applying Hooke's law with these forces to this
geometry, to this line. Basically. Alright? So this is what it
is interesting. Now, e.g. if we miss some
of the inputs, so e.g. if, let's say I
missed to give the anchor points as an
input, what would happen? What do you think
it would happen? Let me just now re-size it. I'm going to make it true. So I reset the simulation. I'm going to take this out. Let's say by mistake, we were building this definition and you have lots of inputs, but then you miss this
input for some reason. What do you think
it would happen? Let us now check, if I double-click to run this
simulation to make it false. Oops, it falls down as if there was no anchor
point basically. Now you see that
even if with this, the length of the
curve is growing, but really slowly,
there is no anchor. Okay? This is interesting. What is remarkable about this is that kangaroo
is not telling us, hey, it is wrong. It is not like this
turning into a red color. Usually you would expect
that sometimes grasshopper, or most of the time
and grasshopper, when we are missing
an input that is needed or necessary
for the simulation, when you're giving
a false input, then it becomes red or orange with a warning
message saying, hey, something is wrong,
something is missing. You have to still
give an input. Here. We miss the input,
but it's still, it's still runs the simulation,
which I think is logical. It's working. It's applying
the forces and just working. We don't have an anchor because maybe we don't want an anchor. Sometimes you have a
situation where e.g. we don't have any anchors,
basically, it's working. What if we had
already an anchor? But we don't have a force, the unit of force. I'm going to take
this from this merge. So we have the spring from line. We have an anchor point. What? We don't have any force
pushing it downwards. If I now run this
simulation, I think happens. Even these springs length
is always addressed. Why? Because nothing is
pushing it downwards. And I'm not telling it now that there is
actually gravity. It is not considering anything except for the forces
I am feeding it with. Springs from line. Okay. Fine, thanks. That's it. We have an anchor point
that's anchored there. Alright. What can
I do more for you? Nothing. I mean, that's
what we have, right? Even if the anchor out, since this is
starting as a line, and then there is an
output, this output. And I turn this false. Okay? Our only solution, but now
it's simulating something, what is not doing any change? Because nothing has changed. There is no force
pushing anywhere. What if I bring back
the unit of force? And I take out the
springs from line, what do you think would
happen if I do this? So what's happening now is that we have an anchor,
anchoring the point. We have a force
pushing downwards, but we won't have any springs. We don't have any
stiffness as if there is no spring to the cable
with zeros stiffness, basically that's
what it's going on. If there is no force that
is pulling it together. In other words, and that's why there is no force
pushing downwards. Basically, it's stretching. Length of it is going crazy. And thousands now 4,000,
it's going forever. That's what's happening now. I'm going to reset it. And so now we understand this
is actually a force pulling the line together as if it was spring with a
certain stiffness. Now, we just saw that if we
don't have any spring given, and we run this with a unitary force
pushing it downwards. We get this as a result. What if we do this again? But now, instead of the current stiffness
of five will give it a stiffness of zero.
Let's try that. Because I just said that we
don't have any input given. That could mean that this
difference is zero, right? So let's try that. It's going also as if there is no force putting it
together in a way. It looks like it's slower, but it's going without
stopping or slowing down. You see as if we
have this spring, but it has zero stiffness. So it's not stopping it, just increasing the stretch. Here, we can just play with it. So if this difference was zero, that means that it will
stretch continuously. If, let's say now becomes like, it becomes like a game where
if we play with the input, let's say ten, then
50/10 equals to five. So that means that the
resultant would be 105. If I change the stiffness to ten now and run
the simulation, I will lose five. That's what we would expect. It's looks like
switching something. You see it's applying
Hooke's law. Again. That's what's happening. Just a proof-of-concept that just
doing that, applying it. Okay. I'm going to reset
the simulation. And I'm going to
bring this back to five to match our example. Now, I'm using here kangaroo
physics with the simulator. Okay, if I use the
zombie kangaroo, you see here it has
a similar inputs, but not the same, not all of them the same. So if I flatten this one, and I flatten this one. And if I connect
these ones here, the anchor point here, the geometry, the line. I won't change the threshold and iteration will also
keep it unchanged. I will also copy
these in order to test our result geometry out. So what, what is, what is meant by a
zombie kangaroo? Zambia Islamic kangaroo
means that it's not going to show us any
bounds or iterations. This is what it's meant by it. Islamic kangaroo means
that is not going to show us any bounce
or I iterations. This is what, what is
what is meant by it. So zombie kangaroo means a non-life version To be
used without the timer. You see, I did not
give it any timer. And so it either
performance a set number of iterations or continuous until an energy threshold is reached. And this means that
it will give us the, directly, the final result. But here you see that did not reach one of
the ten exactly. Remember this one? When we did that, it
reached 110 exactly. Waited for it. And then it's Wonderland ten. And then you stop there. This one did not do that. So here you either have to tweak these inputs to maximize
duration and then threshold. Or you have to be
careful about that. If you don't find
the optimal result, the equilibrium
for this example, let's say with 2000 iterations, That's the maximum iterations that this component is using. Now, if I just try
to change it to, let's say I don't know, 10,000. It didn't do any change. If I change the threshold
here, it's currently 0.1. If I say 0.001. Okay, became bigger. It was 109.65, now it's 109.9. If I also make
this even smaller, we get even a higher
value, 109.99. So you see these are settings
that were set correctly. You would actually get directly the final result without
having to wait for it. If you don't want to wait
and see the bounces off, I personally like
to see how it's bouncing and sometimes
going back and forth. And you may like to
see that happening. And not directly
the final result. It's really up to you. I just wanted to
let you know This exists as an option and that it will give you
directly the final result. But be careful that it may
not be 100% accurate or matching what you would get with the normal solver,
the kangaroo physics. And this is always
about kangaroo, 10.099. We're also going to
look at these ones from kangaroo two. Alright. I'm going to move this one. I think this now pretty clear
for us using this example.
4. Kangaroo I vs. II & Hooke's Law Part 2: Now let's use the same example. But now with kangaroo two, I will stretch is maximize it. And here I'm using is
actually the same. So the same steps here. So construct point moving
downwards by 100 mm, then making the line
that's the same. Alright? And here
for kangaroo too, there are small differences. If I bring quickly the
standard normal solver. I'm not going to
use this one here. But you see that if I just put this one side-by-side
with this one. So this is just above this one. You see that we have here gold objects versus
force objects. Because these are
now called goals. We don't have an
anchor point input. So they're good points
with kangaroo two are actually considered
as a force component. And I also think that
it is now more logical. The act of pushing the
objects or geometry, or trying to keep them there as if they had a force
of keeping them. They're maintaining
them in place. And other words,
that's why anchors became goals and not
the secondary input. Also, there's no geometry
and put anymore. So in order for us to
see it at the output, we would have to use a new
component called show. We have a reset input. The threshold and tolerance
here are not changing. And then the on which
replaces simulation reset. Now it's called on and now the opposite is
actually the opposite. So if it's set to true,
kangaroo will continue to iterate until reaching the
given threshold value. If it was true, it
would start at, if those false, it won't start. But here, if it was false,
it would actually start. So if it was true, it will not start is
the opposite of it. So here's the
simulation reset true. So it is set to where it is, reset it to zero. But here with Kangaroo
to it is the opposite. So when it's false, it's saying, Don't
start, don't simulate. But when it's true, run this
simulation or simulate, which I also think it's
more logical and makes a, makes it more intuitive for
us while working with it. I'm going to delete this one. And then first, before
showing the simulation, I tested here all of the
solvers of the new kangaroo, the different solver types. But before doing that, let's now try to find these
ingredients that were actually used with
kangaroo 0.099, but with the new one or
you can go to two or 2.42. And so this is actually
coming from here. Anchor, anchor goals
point, anchor, this one. And this one, it needs
a point to be anchored. Actually, I'm going to, let's see this off. Alright. So the anchor is the
point, as we said before. Now for the springs from line component that was
coming from Bengaluru, one there from forces within
grew to it is actually called length from goals line. So it is the length of the line. So as if now to make things a little less confusing
than before, do you remember when we
were saying that, Hey, we don't have to draw
it as an actual spring, but this will actually be
converted to become a spring. Here, kangaroo two, it
has a different meaning, but the inputs are the same. So that's the strength which
represents the stiffness. It has a length, arrest length, and it has the line input. The output is a spring, but it's not called Spring. The output, the components
called length line. Output however,
presents a spring. The main difference
is in the naming, but it's doing the same
thing with less inputs. So here we have connection, the line, the stiffness, damping, rest length, upper cut off, lower
cutoff plasticity. Here only have these inputs, the line which was
previously the connection. So the line, what is our line? The length of it, which is the rest length. When you hover over
it, it says length. If not provided, starting
length would be used. Okay? Actually, even though knowing
that I'm feeding it with the length of the line
itself and the strength. So the strength, which was
called previously stiffness. I'll bring this back to 5.4. The only force, remember the unit of force that
was pushing downwards. Now it's called load. And actually it
is the same icon. By the way, it's
under goals point. Is this one load while there
before it can go to one. It was actually here
and it was called the unitary force under forces. And you see the
icon is the same. Basically. So goals point, load, alright? So this load needs, while before it, it had
actually only two points, only two inputs, the point and
the force that is pushing, and then we're in
whatever direction of the vector of the force. Here. Not only we have that
one, but also weighing. So we have the point, okay? The second point, which is
just given as an input, we have the force vector, which is exactly what I've
given here before, Unit z -50. And the weighing is a
scalar weighting factor. For most purposes,
you can leave this as the default one dot zero. I'm going to also
leave this there. I'm not going to play
with us anymore. But you can later
on use it and try to play with it and then
check out the results. But for now, let's
keep this here. Alright? And also
for the anchor, there's something
else for the anchor. Before it was only
like a simple point. You see the input of this in the simulator in kangaroo on. It only needs a point
to act as an anchor. But for the NCL component now, this coming from
Kangaroo to this one, it is not only a mere point, but actually there
is a point input, it has a target. And you are actually
going to see this later. So it's location to
pull the anchor tool. If left empty, the initial
location will be used. For now, we're not going
to move the anchor around. We're going to keep
it where it is. Alright, so that's the origin. But actually we can
play with this. And later on, I will show
you in the next units that you can start with
anchors where they are, let's say starting position. And then during the simulation, in the middle of
this simulation, we're going to move
these anchors around. We're going to stress the
membrane and play with it. This for you to know. Emily, strength,
because the anchor should actually not move, right? The point, I don't want
it to move anywhere. So that's why I'm giving a really high number
as a strength. And in this case I'm giving
it like 1 million as a value. So there's 1 million newton per millimeter as the
stiffness of the anchor. Alright. I don't have
to call it stiffness. Actually, I'm going
to leave this out. It is an anchor point that has
the strength of 1 million. Basically. That's what
I'm giving you here. And you can actually
give it maybe 10,000. It works. But just to be on the safe side, I prefer to give it
a really high value. Sometimes it may happen
that if you are, let's say you have like a big project and you might move less a few
millimeters something. If the object is too big or
something it might happen. So that's why I prefer to be on the safe side and give
it a real high value. Now, what is new additionally in a kangaroo too, is as before, we have now many more solvers than before. It can grow on. We only had two,
physics and zombie, but now into the two, we have all of these except
for the grab and show. All of these are solvers. And I'm doing here is
actually to show you the difference between each of these using the same example. So we can see the
difference I'm using here. For instance, this one is the
solver, the normal solver. This one is the bouncy
solver, which is this one. And then you see also
the icons of them. They show what they
will be doing. For the normal solver. There is a simplified
kangaroo icon. You see this kind of small red curves and it
is bouncing in a way. This one as the zombie solver. And then the last two here I'm using are the steps solver, which is this one. This one. And then you see here
like a film strip showing frames
representing steps. And the soft and hard solver, which is this one. Alright, so most of these
actually have the inputs that need a reset
and on and off. In this case, the
reset is used to reset the solver as a button. And the on and off
now are different. So the action is the opposite of previously when we had
this and kangaroo one. This Boolean toggle for
the simulation recent. Remember this one
that was true for reset and then false to run it. So now it's the opposite as we, as we said, false
means to turn it off. And then orange threw
this on just to run it. Alright, so what else? We also now don't have
anymore the geometry input. We saw that the anchor points now have been replaced
with the anchor, this one, but now also
the geometry input here. We don't need it. We don't
need that anymore actually. In the next sessions, I'm going
to show you we would need something sometimes to
use this show component, which is a new
component and into r2 that replaced
the geometry input without needing to
input the geometry itself directly into the solver. But it would be part of
the goals in any case. So we have these and
the outputs of them. This one For the goal
option, output three, which includes all of the geometries except
for the points, this v for the
vertices or points, and this RI for iterations. So this is the normal solver. As the reset input, we only need the
goals from the merge, the reset button, and the
Boolean toggle on and off. For the bouncy
solver, we have this, but then with few more
options for damping. And for the, for
the zombie solver. It actually doesn't
need any button, only the goals, and then it just runs automatically
on its own. The steps solver,
it's going in steps, so we will see how we can actually use it to
animate options. And then this one for
soft and hard solver, we're going to dive
deep into this one. Here you can separate your goals between soft and hard goals. Basically, that's the
main idea of this one. In any case, let me
go back to this one. Starting now with the default
solver, the normal solver. Also. One of the other
differences is that it has this message
under this one. So the bouncy solver and
the soft and hard solver. They have this
message which says, it would actually give you
the status of the solver that now what is paused
or when it's done, it's going to say converged. And when it's running,
it's going to say running. So you can actually know what's happening,
what's going on. And you can actually
understand that maybe you would have to wait a bit when it's running and then wait for it until it
becomes converged. In any case, I'm going
to zoom back here. Okay? So now I'm going
to turn this on. So I will turn this one on. And actually these two
buttons are linked to all of these solvers where we
can actually use them. And you can now also see the
difference in the outputs. So that puts you,
I'm using again the same thing as before. The curve is the output and
the length of the curve. And I want to check and see if it would give
me the same result or not. If it's going to give
me the correct result, which is 110 or not. So let's check this out. If I turn this to true
and then I reset. You see, now, this actually
worked really fast. Looks like close to the zombie solver
behavior and then away. This one took a bit
of time to converge. Now you see both of
these are now converged. It's all random and silver. If I do it again, you see that now it's
converged directly and then this one
is still running and then it's converged. See that this thing is that we're getting
now 109.99, etc. While here I'm getting
110 dot 000 and then something with
the zombie 9999. So you see that there's a bit of difference in terms
of how they behave. Let's see why this is happening. What could be the
reason behind this? If I'd not change any inputs
of these inputs here, Lawrence is now 0001
thresholds at zero. Let's see if we
actually tried to affect these inputs here. What would happen if I
change this threshold? Let's say to one. So there is a change
if I rerun it. Okay. It's actually
different from before. It was wondering 9999. Now it's one of 986. If I change it to, let's say 100, 100. Okay, it looks like the same. If I bring it back to zero. You see this behavior. I wanted to show you this
that sometimes when you change some of the
inputs, in this case, especially for this solver, if the threshold
is changed to one, and then we bring it back to zero because we
started with zero. Actually, if I do this, you see it's going back. If I change this back to zero, because we actually started with zero, it doesn't converge. It's staying, just
stays running. But it's actually giving us
the correct answer though. But it is still running. I think this is a
glitch in kangaroo. If I change this to one, then I try now to
play with tolerance. If I want more zeros here
and then start again, you see, they're not
really affect that much. If I bring this back
to three zeros, you see an order for
you to test or no. If you're component
is the default one, you can always bring
a new component and u1 from the plugin. So you can check. So this is the tolerance
with four decimals. And then this is with only zero. Now if I bring
this back to zero, does this, if I tried to play
with it and then make it, let's say I don't know
100 instead of zero. Similarly, the previous results. Now you see this, I did not change anything with this one. If I bring these goals,
actually two here, just take all of these
inputs back here and then, and then this, you see
this back to 110999. And this is at zero. Okay? So be careful about that. If sometimes you play with
the inputs and then you get an unusual behavior
like this one. I bring this back to this one and the threshold
bring it back to zero. You see it's not converging. This is like an abnormal
behavior basically. So that's why I'm saying
that you can do that. I'm going now to take
this out and then bring this back in its
place in any case. So this is quickly about
the normal Solver. The Solver, what is
interesting now with this new input about the iterations and also that pink I'm not
going to talk about, I mean, I'm not
going to play with these thresholds and tolerance, which are the same as here. But I'm also going
to touch this one. I'm going to try to
focus on the iterations. This one. Now for the iterations. So it's saying this many I iterate internal
iterations will be performed for each result
output if I play with it. So if I click on this to
see how it's behaving, you see that it's bouncing. That's why it's
called bouncy solver. Actually, when you
look at this result, it reminds me of what we were actually doing
with kangaroo one. Remember it with kangaroo one. We're looking at this. And then you see
stretching and then it's reaching the goal
without bouncing. That's what. But also different
with this one. Usually when we have a spring in real life and you're
applying a weight to it, it will actually bounce
and not just stretch down as if it's like an elastic. It's stretching and it has an elastic and then converging. But it should
actually be bouncing. Like this one. That's a more
natural behavior actually. And that's another observation about the differences
between kangaroo 1.2, especially with the behavior. Now, let's go back
to the bouncy solver and look more closely at
the iterations input. Here I'm using a number slider. If I change the values
now, reaching 110. So if I say put it at
ten, what would happen? It's 100.999. If I slide it to 20. Again, you see the
number is closer to 110. If I change to 38,
it's almost 110. So it looks like now it's
slightly higher than 110 with a very small factor. As if now it's
bouncing and then you are requesting it to add more
iterations to the mounts. And then with the 50 iterations, it is now reaching
the result 110. So this for you to know. The only thing now that I
don't really like is that it's not bouncing anymore.
I mean, yes, true. I'm getting the correct
result, the correct answer, but it's compromising
on the bounce effect. The more bouncy effect was
with only one iteration. And then now it's like it's bouncing more or less,
reaching converged. It has taken more time, which I would like to see, but it is not really the
correct answer precisely. What is interesting though, for us now, this answer, this is a really small, really small difference between this one and then this
one was wondering, wondering then absolutely, but there is still
like small difference. But beyond this decimal place, then the case
zombie is the same. So actually, we don't
need to reset the goals. And that's it, just bringing
the goals and that's it. You can actually play with
the maximum iterations. So for instance here
now by default, when I bring the zombie
solver, by default, the value is 50,000 for
maximum iterations. Here it is the same. If I now change this
one to, I don't know. Actually down to, let's say 100. And I disconnect these ones. Okay, it looks like we're
getting the same result. If I bring this back to
20,000, didn't really change. I thought maybe it would
give another result. But it looks like it's not
if I actually try something. If I do this, if I and I
do this, it is different. Okay. Looks like
maybe this one maybe maybe blocked was kind of like blocked or stuck somewhere. Yeah, it doesn't change anymore. So also be careful about that. When the zombie solver, it may not respond directly
to the changes that you are applying in case
of maximum iterations. In this case, if I change
this now to 50,000, because I remembered that
this was actually different. Okay, It changed. Alright, so here
it is good to keep this max iterations at
a big number actually. And then there's also
a pretty close to 110, although it is saying
1009999 steps Solver. Now, this is an
interesting new component. Sorry, I'm going to talk
about this message soon. But let's go to the step Solver. What is interesting
about this one is that, so it says the description
says the solver, which advances only
when input refreshed, useful for making animations. I'm going to keep the tolerance, as it is. Momentum. I'm going to keep the true. It's true. But if false, the simulation tries to converge
as quickly as possible. So I don't want that. I want to make it bouncy. Bouncy than pink. Keep it as it is.
Sub iterations, I'm going to put it at one. And this means that the
number of iterations per frame for the animate, if I set to false, the
simulation resets. If true, the solution
will advance by one frame each time
this input is received. And here I'm saying
that I'm going to have only one
iteration per frame. Alright, so let's look at this. The goals are coming from here. If I play with it, you see, it is kind of controlling
the speed of it. If I change it again, It's not bouncing
back. Round 109. More or less, more or less. It is like a natural pounds. This is how the results
would look like. And you can see that now for
the 50th iteration or frame, I'm getting this result if I
actually make this bigger. So let's say 5,000. Let's go back to zero. Bouncing, bouncing around
saying 3,000, almost 110. Okay, Then it looks like here, it just doesn't give me
any new different results. After 4,000 something. And you see that even
when I go back here, what's doing is that when I
progress and then go back, it just like adding
more iterations. Basically. What is interesting about this component is that now you can actually export these as frames, so forth, e.g. if I can say I want to
only let's say 100 frames. And also keep this. Alright, like this. And now you can
actually right-click on this number slider itself, and then click on animate. And then you can animate, you can actually
export your frames. So frame-by-frame to assert
the location that you choose. And then you can actually
make a batch out of this or make a GIF
image out of it, or even like a small
video sequence out of it. Just use these frames for
animating the simulation. Alright. So the other thing is that I thought it would be
actually interesting in this case to have a
counter that would have a running number that will
just increase with time. And we can actually
input this into Animate input and then
see what would happen. So this counter, How
I Built This one, actually, I got this
counter from kangaroo one. It is one of kangaroo
one components. It needs a reset
button to reset it. It needs a trigger with a timer. This one, which is coming
from perimeters trigger, this case, I'm using
50 milliseconds. And here I'm saying, so counter makes sure to
click on Play button. This one to run. I'm going to first reset it. Click on this one, and now
it's paused. It's not playing. And now I'm going to give this, instead of the numbers
data as an input, I'm going to click on this
to see a preview of it. And I'm going now
to click on Play. Also. I want to see this
length here and play. You see now this number is always feeding into
the animate input. And you see now around 100. It does not say converged. But I know that
the answer is 110. You see? So for me, after 100 it's
converged more or less. So reset, bring it back in. Now because this is playing. When I did reset it. Just replayed without having
it to right-click on this. So if I click Play
and I make it run, and then I click on Reset. Now in the middle of it, it just resets again. I don't need to read
click again on play. In order for me to stop this, I have to click on pause, and then that's it. And then the result is reset. That's it. So pause. I stopped this
counter from running. Reset and that's it. Alright, so this is what's interesting about
these steps solver. If you need to animate
the simulation for any project
that you may need. And as I said before, the soft and hard solver, it's up to you to test
and play with this. I want, I'm going to check
this solver in depth here. So this is basically a brief comparison
between these solvers. The main difference in
Kangaroo to about the solvers. With this really simple example. Before jumping to
the second example, I'm going to show you quickly about the new
graph components. I think it's really interesting
component doesn't add more accuracy in a way
or a different result. It just lets you play
with the geometries, with your resultant geometries. I'm going now to connect
this with emerge. So this is like
one of the goals. Actually. You see I said before that
when this part of the goals, the zombie solver doesn't work, as it doesn't have
a reset button, and it simply shows
the final result. It does not work
with Grab component. All right, I think that's
fine for us now I'm going to click on the bouncy
solver, I reset it. We don't see anything yet. The thing is that when we run it and to make use out of it in the previous
version of kangaroo. In two-point for t,
if I'm not mistaken, you had to click on
hold and Alt and then drag geometries
or particles. I will actually change
it to particles because in this case, if you try to drag the
line, it won't respond. Just not do anything. But if I Tried to drag the particle. It will work. So many, but I will expand
this a bit more. You see that? Now we can go 2.42. You'll need to click and
hold on Alt anymore, as it will also
work without that. Just now simpler and more intuitive because
I will also take this out from here. Correct? This one, take this out. So click. Drag. Alright. One thing which is now
interesting is to see again, the response of the
different solvers with the normal solvers, you see not normal. So we see that it
bounces very quickly. You see it looks like
the zombie solver, like it doesn't bounce at all. But with the bouncy, one
is more natural behavior. It is more playful. Now, what if I try to move
this point towards the anchor? What would happen? We can feel the stiffness
of the line resisting the pool of its ends and
towards the anchored. If I tried to change the
stiffness less than five, if I changed it to one. You see it now stretches more. Because this is a
difference in our less, which is normal
response behavior. Especially as more than 110, it becomes one-fifth
t, It looks like. And if I now try
to play with this, you see that it will
not only bounce, but also looks like
it's more elastic, more stretching while bouncing. Which is an expected behavior. If I bring this back to five, you see that now
it only directly responsive to the
parameter change and adapt to it in the middle
of the simulation. Reset. You see, so this is an
interesting component that lets you play
with the geometries, try to make studies
or tests with them. I'm going to take this out. Alright? So my goal now,
until this point, is to show you with a
really simple example with kangaroo quickly
about the main components, the solvers and the resulting simulations and the results
that come out of the solvers. So this is it for this session. The next example will be
the catenary curve example, which is a more
elaborate example. It will be the start
of the next session. So thank you very much for your presence and see
you in the next session.
5. Learn how to simulate a Catenary Curve : So this example of
the catenary curve, we're going to replicate the
physical glittery curve, the physical category chain. But now with kangaroo, This is a quick definition
of the catenary curve. So Caitlin Marie
and mathematics, a curve that describes
the shape of a flexible hanging
chain or cable. The name derives from the
Latin cutting area chain. And if really hanging cable or a string assumes the shape, also called a Jeannette. If the body is of
uniform mass per unit of length and is acted
upon solely by gravity. This is the source,
and I'll let, let me show you again the
diagram of the catenary curve. This one, It gets rid chain. In this example. We're going now to try to
replicate this example. But now in kangaroo one. But now in kangaroo, one thing to know is that the
category curve application is also the basis of most hanging geometry
studies in Kangaroo. We saw that kangaroo uses Hooke's law to make simulations. They get a curve,
on the other hand, can exist in most hanging
geometry studies, such as a 2D catenary curve, membrane studies, ridges, etc. Similarly to the example of the spring as a very
basic simulation, if we now understand what is a category curve and how it can be simulated and
getting kangaroo. More complex examples
of mesh membranes, etc, would be then easier
to apply in any case. So first let's start
with this one. I'm here also applying
the same example, but in both kangaroo one. And can go to, alright, just to see how both work with
they can't reserve. So I'm going to nudge this
one here, this one here. Alright. So I have previously drawn a
kid a curve inside of rhino. And I did not want to draw
the curve like a parabola, similar to its resting shape. So to make kangaroo
challenge and the way I wanted to draw
it differently. So this is the curve
drawn in Rhino. It's inside of this layer curve. And the first step is, well, first
referencing the curve. I'm going now to
turn the layer off. So this is now reference. And now I'm converting this
curve or this geometry into components that
kangaroo would understand, which is called, as we saw
before, discretization. So I'm dividing the curve first. I kept this count to ten, the default division value. And then I'm making polylines
between the points. And then I'm exploiting this one polyline to get the individual segments
In-between each point. So these are now
the lines segments. I have now ten. And now with this list item, I can check if everything
is working well, where these are, 123, etc. So I turn this on as well. These points, I can see these segments
between the points. Alright. Now, once having done
that from the curve, I got these segments
and these points, these points, this is the
shortcut from the points. Now, I'm using also the same components
as previously used. In this example. With the springs from line, unitary force and
the point as anchor. However, we don't have now
one anchor point like before. We add here, one anchor point. Here we have two points
as anchor points. So from this curve, when I extracted the points
with the divide curve, I got these points obviously. And then I just called
the middle points. And a fault actually two steps. I got the endpoints with
this endpoints component. So these act as anchor
points and I put them together in a group. Then what I did is
that I excluded these two points from
the rest of the points. I use the coal index with
zero and minus one because I know that I want to take out both the first point
and the last point. Of course, with the rap true, otherwise, the minus
one won't work. And then I got, I get
now these points. Now from these points
to these points, and then these remaining points
to work as anchor points. So now these are my points which I will use to apply the
unitary force onto. So we have the unitary
force that is now pushing these points supposedly now downwards with the
force of gravity, I have the anchor points
that will actually prevent these segments
from falling down. But to keep them anchored
at these two points. And I have the third force, which is the springs from line, to have the force in-between each segment to maintain
it, to keep it together. Similarly, in real life, when we have a chain,
a metal chain, the distance between each chain connection
will not expand. Normally. It should
stay the same, right? If this chain is made out
of metal, let's consider. Now, I'm giving a
high number for the stiffness for these trying
to let the leg can grow. Understand that. Please don't compromise
on the length. Let's keep it as
much as possible, the same as the original one. So I put now these springs from line and the unit of force
in one merge component. Here for the unit of force
concerning the inputs I use here -102 are going
to actually now play with these and see
what results we would get. So I use this as a
number of stator and then this is an input
for the stiffness 1,000. The rest length is the
same for this segment. Nothing changed in here, not play with any
of these options. So now the segments, I would hit expand this a bit. I'll zoom this out a bit. So these two ones, as we know and kangaroo one go together into the force objects. And then these anchor
points, the extremities, will go alone inside the
anchor points input. And I use also the lines. These ones, the
original ones that I'm making out of these
springs from line. I'm using these as the
geometry to be transformed. And I use the same trigger here. And now I have with
this, what I will do. Turn this preview on. And let's turn this to false. Now we get this result. So as a first observation that looks like it's
logical, right? It looks like it's
working correctly. It's hanging down as
we're expecting it, and don't arrest again. If we click it again, it is responding as expected
and it's bouncing a bit. But you still see that actually the result is not the final
result, it's still running. So what I did, I use also the same strategy that
I used before with the previous example
when I'd also used also here previously
the curve and length. And then I double checked
if the simulation was actually applying the
equation correctly. Remember, with this 110 value to see if the result
was correct or not. I thought what if you
could actually do the same here and double-check
the curve lengths, the output of these. And I put next to the
original curve lengths. So these lines before
that were not yet applied to any force to these
segments from the curve. What I did is that I extracted the curve length
of all of these. I use these inputs for the curve length for this
component specs from line. However, I also used this
as a double checker. Next to the new results, the output of the
simulator to double-check. Okay, So when we
look at this now, it looks like you see it. Remember when we ran it and
then it looked kinda logical, but actually it was not correct. You see now the result, we're getting 774 here. But the original length
is seven to eight. It's a bit, It's
a big difference. It's not that order of
several decimal places, but it's a big difference. Here is 709, here is 664, etc. It's a big difference. So we learned that
as a rule of thumb. Even if you see things
that seem to be working, you have always to
be critical and have a critical eye about the
results and double-check this. You know, like in this example, we have the original length. If, in this case, where, let's say we're considering
that we have like metal elements or something
that will not expand, they should maintain
the original length. So actually, what I want
to now to play with. With these inputs for us
not to go back and forth. I'm going to just bring these, put them next to us here. And we're trying
to check out what, what's going on here
with the forces. So this unit of force, Let's check out and see if the effect of this
simulation we have now 100. So it looks like maybe could be that this
value is too big, pushing too much downwards. Because the results are
now bigger than these. So these are the original lens. And you can see that
these are bigger. So it looks like they're
being stretched more anyway. Maybe, let's say if we
decrease the value. You see now how this simulation behaves when I play with it, with this value, even when
it becomes a positive value. Now it looks like
a catering arch. So just flipping the value from negative to positive,
we get the arch. Because now the
vector is pushing upwards or downwards anymore. But in any case,
so if I go there, so if I change the value to, let's say, let's
check the value now. If I change it to, let's say, minus ten instead of 100. So the results are now much closer to the
original length. But still here it is,
let's say 733728. It's still not the same. However, here it
was seven before. So it's now six dots 68, so it's much better, but still
not yet acceptable for me. I would be happy with at least
three matching decimals. But now still the first
decibel is not matching. And so what I've
also play more with, let's say, you see
now it's going up. Maybe if I, let's
make it minus three, Let's see what happens. But still still bouncing. It's still not the same. You see that? 1 372-866-5664. It is much better,
but still a bit, let's say not within the
acceptable boundary. Actually. Let's try to play
with the stiffness. I gave this 11000 as a value. If I give it, let's say
10,000, what would happen? See what happens. I
think it's a glitch, glitch inside of Rhino
or actually kangaroo, that it does not tolerate high
values for the stiffness. Maybe in this case only
being more than 1,000. Let's try with, let's say
5,000. What would happen? Okay, it's working. Hopefully it will not crash. Okay, it's working. You see that because the
stiffness is much stronger, that it was a bit slower
to react and duress down. It looks like now
it's much better. It's now 7 2 8 9, 7, 2 8 6 6, 6 4 5 6 2, 6 4 3. Still it's not the third level of decimal that is matching, but it's much better. I think in this case, if you go down with
the urinary force to, let's say minus one. I think it could go
if I now rerun it. And what I would do. You can try to play with it. If we check, let's
say 1,000 again. What about 100? And let's check the results.
Bringing this back. And then let's make
this back to 5,000. And then this back to minus one. You see that the middle of the Tribulation changing inputs. Now maybe could be
that when you do that, you may get wrong
results in the end. Like things would wrap around other things or
get stuck somewhere else. So it could be that it wouldn't
I mean, it might happen. So be careful about that. When you're changing
the parameters during the simulation. Now you can see, I can
see the results now. There are much, much better. 7287, 7286, 6644, 6643. I mean, it's still yeah, it's close enough but not
perfectly the same lens. As the original ones. Let's see if I do
minus zero dot one. So it was like just
barely pushing down. But not too much to affect
the lens are alright. Now it looks like
it much better. 7, 2 8 6, 2 8 6, 6, 6 4 3, 6 4 3. I think all of the numbers are at third decimal
precise or matching. Maybe not. This one is 69, this is 70. Almost there. Yeah. Well, That's what I
wanted to show you, is that you have to play
with the parameters, in this case, to try to find
what you're looking for. Matching your situation. Basically, it is a chain
of metal or elements or wood or whatever material
connections that you may have. Just bear in mind that
maybe you have to input matching parameters like
stiffness to make them work. And you saw that if we go, let's say 10,000
stiffness, it may break. So maybe 5,000, it's
working better. Maybe I don't know, lets, you can try also, let's say
7,000, what would happen? And checking the
results. And you see that now when I bring
this back to 1,000, you can see it's reached
the action with the inputs. So I'm going to bring
these back here. But then we're okay. We'll turn this off. And we'll reset the simulation with the true end kangaroo on. Now, let's look at
this same example. But now we've kangaroo two. Okay? So here, the same start. I have the curve, the curve, and then I have the points, the polylines exploded and then segments the same
thing basically here. And as we said before, that now we don't have any
more anchor points as input. I know geometry basically. And so here for
this, for this test, I'm only using the normal
solver and the bowtie solver. I'm going to make these as
preview on both of them. And so what I have done here, we have the endpoints. These ones. I put them together to feed the inputs of the anchor point component. Lines. These ones, the segments. I'm using these ones to feed into the length line.
As we saw before. This is similar to the springs from line from kangaroo one. And the unit of force which
is now integrity to the load. Here I am applying this to all of the points
except for the anchor points, as we saw before,
except for these two. Alright? Alright. Now, I'm doing the same, the same here. So the output here is
a curve at length. And then here I'm using clean tree because
otherwise I would get empty or invalid results which are not useful
for us for now. And these original length and the petal next to
the simulation results. Now, let me run the
simulation by clicking here. Okay? What we are seeing now here
is both simulation results. It looks like this
is what solver one, this is the outside one. It's bouncing but really slow. And that's because
the value given to the stiffness of these
lines is extremely high. It's like with nine zeros. What I will do actually here. And there's also given the same strength for
the anchor points, which I think makes sense
that the anchor points, we need them to be extremely high value because we don't want them
to move anyway. That's the definition. So I will copy this over there. And I will now zoom out a bit just to show
the results here. So first I will
start with the 100. Okay? So when we have 100 as
stiffness strength, we get this result, which clearly is very far
from the original length. And also because it's
pushing strongly down, It's like with 100 as a weight. So let's say minus one. You see now it's better. The results are much closer
to the original length. So it's similar procedure. Now what I want to say here is that what is interesting
with kangaroo two, which is not in kangaroo one, is that if you bumped this
to the higher numbers, the strength of these ones, you will not get this broken like before
with kangaroo one. If I don't get to go to one
on and run this simulation. And I make this at minus, as we saw before, 0.1. And this is a 5,000. So we saw that this is a
really close but not perfect. The fourth decimal
place not matching. And this is the first one. You see that like we
have three curves here. Simulating, running, still
running, and maybe merging. It looks like merging
21 common location. This one as this one. It's coming from kangaroo one. So it's kind of like
going to arrest. And I think it's
really slow because of this high stiffness value. If I give it, let's
say 1,000 stops there. If I give it 2005,
let's say 5,000. Trying to reach or match the
location of the other ones. Now, here, the strength
should be very high. If I look at the results, it looks like at the
fourth or even fifth here. Fifth decimal place, it's
matching the original 16. The sixth one is not
matching anymore. So we have 28 617-128-6176. So I think that the result is now pretty much
acceptable in a way, although not perfectly
matching all decimal values, especially that these
are now in millimeters. So the precision level
is not acceptable. And you see like
this bouncy one, you see very small
differences between these two is over
and the bouncy one. So this is the solver. This is the bouncy
one, and the middle. The middle is the kangaroo one. And it looks like they're all pretty much close to each other. So this is the good thing, is that in Kangaroo to, you can bump stiffness
or strength values to really high numbers
without having geometry to crash like
and can go to one. Now one thing I want to
show you is what if, well, I was thinking about
that from a physical, real-life point of view. What if, instead of calling these points out and only apply the force to these points without applying
them to these anchors. What if actually, because
in real life, I mean, these anchor points,
although they are anchored, but they still have
their own weight. Let's say they're anchored and they are also
affected by gravity. What, what if actually also
give them like a force? Would that make a difference? If we include them, let's say
with the load pushing down, as well as having them to be
anchors at the same time. These points as our
anchors, and additionally, they are part of the points that have the load being
applied to them. So what I've done here with
the same example as above. What I've done, I'm going
to make this minus one. I did not use the coal. I just use all of the forces that we have for the
load to be applied to. Of course, these points will
have any way to be anchored. This is giving a
really high value to both the anchor
points and the lines. And now when I run it, this is on and maybe
turn this is on. Alright, checklist or this off. We'll also copy this here. Try to run it, maybe by making 1,000. Then get this back. We'll copy actually
this number there. Now what I'm doing here
is I'm showing you the results that are
coming from all points, including anchors,
are given a load. What we have done here
without calling these points, with these two points
from the load, I have this panel that is
showing these results, please ones which
are the points. So only Paul is not
touching anchors are given a load and
the original lens. And you see that it
looks like there's a small difference between
these ones and these ones. So here is like 61716176. It looks like 7171. So these are actually closer
to the original length. 4, 4, 8, 6 4 3 4, 4, 6 4, 3, 4 0 4. You see? So these are the results where the anchors have the
loads applied to them, not excluding them
from the loads. And it looks like it's like
a more accurate result. So it's really depends on how
you build your definition. What to include in
the definition. What are the force is used? What are the stiffness values
or the strength values, the anchor values, the load
values to affect the results. So with this example, I thought it is more
realistic and it looks like it's closer to the original
length as in the end. So that's quickly
looking at how to make catenary curves or
arcs with kangaroo. Now, what about kilograms?
6. Use real life units, converting Kilograms / Pounds to Newtons: What if we actually have a
certain cable or a chain? And it has a certain weight in kilograms and not in humans. And we just want to try to try that out with him Kangaroo
to see how it's going to, it's going to behave
when it's hanging or whatever we want
to do with it. So actually it's pretty simple. We can simply convert
kilograms to mutans. As we saw before, the component units such as the unitary force and
other components. In kangaroo, they
work with Newtons. So from another website, we can find this
definition of kilograms. A kilogram force is a unit of force and the gravitational
metric system. It is defined as the magnitude of force applied to 1 kg of mass under the condition of
standard gravity is 9.8 066, 5 m per square second. We saw this before with the
gravitational acceleration. So 1 kg is therefore equal
to 9.8 0665 Newtons, which can be just here. We can use 9.81 Newtons. Also, this is the same
with the other units. You can convert that to
pounds or to any other unit. In this case, we're using kilograms as an
example for us to use, let's say, more real-life
scenarios with kangaroo. So for instance, as an example, we have a cable that
is 9 kg in weight. The important thing
actually for us to understand is that the cable itself is not divided by nature. It is a cable that
is not divided. It just comes in one piece. However, we need to convert this cable into a group of
segments and particles. And you're going
to ask like why? Because actually in Kangaroo we need these particles
that we would apply the load forces onto
and not the cable itself. So as we bought, as we
saw before, the cable, we need the segments
to be used for the length of the spring length. Then we can give a high value for the
stiffness or the strength. Black there. E.g. we said that that will prevent stretching
and then eventually use the load to apply to the points which are the particles that
constitute this cable. And so in this case, we can say we have
a 10 kg cable. And so this is divided into
five segments as an example. Alright? And if we sketch the cable like this, this is a quick sketch
of the cable and with five segments that we
actually have six particles. So we need to be
aware of this if we have this situation
with six particles. And so section 12345,
particle 123456. Now, we said that the cable
has a weight of 10 kg. We also know that 1 kg is
equal to 9.8, 0665 newtons. So ten times 9.8, because we have 10 kg, we have 980665 Newtons. Alright? Now, the whole cables Wait, is this much in newtons? And we need now to convert this. We want to also let kangaroo
know each particle. What is the weight of that
particle so that the weight is distributed equally
on these particles. And each particle
will have the weight of 10 kg divided by six, because we have six particles, which is equal to 1.666 kg. And so this is equal to
1.66 kg times 9.8 Newtons, which will give us
16.3, 378, etcetera. Newtons. Or from here, from the 98.6, 0665
newtons divided by six. This is the whole
weight of the cable. But in newtons divided by six also gives us
the same result. So the same answer. So now
we can convert kilograms to Newton's following these steps to make kangaroo understand
what we need from it. And then this is the same step. So actually I'm going
now to take there. And I'm going to take this
one just to make it turn off. So we have a point. And I actually
moved this point by 100 in the x-direction. So like 100 mm. And now we have a line. And then we have this one. Now here, our cable. Now I'm dividing the curve, the cable, the line by five. I want five segments. And afterwards I'm left
out with six points. Alright, so these
are the six points. So now we are replicating the sketch particle,
the particles here. And then these segments. If I now use shatter segment
and I use the line as the curve and then
the parameters of the divide curve
as the parameters. And then I will get these
segments separated. So the first 1, s,
third, fourth, fifth. Alright. So now we have five segments, and each of these
segments is equal to 20. This is the length. So we have 100/5 equals to 20.
So that's correct. Double-checking. We don't have, don't really
need this but just in case. So this is the line. And now we want to
again attach the line, connect the line extremities of the line or the cable
to two anchor points. So I got here the end
points of the line. And I put them together. And I'm using here again the same anchor components
for the anchor points. These segments. I'm using them for the length
to keep the spring, to maintain the springs length. Also for the length
is important. You don't always need to
extract the curve length. You can also use the same output of the
segments for the length. Also that works
for the strength. I'm using a really
high number for both the anchor points and
the length of the segments. And for the load, I'm now using all of the points. I applying load to
all of the points, this x particles
with unit Z pushing down by one by
minus sixteen.337. You can also make it like 338 if you want
to round that up. I'm going to keep it
like that for now. Or actually I want to
just make it 338 just to be more accurate. So 3378. I mean, it's really up to you just to make any any number, but just in case. So let's now the actual
weight that we're trying to get as much as possible
close to real life scenario. This load is now being applied to all of
these six points. Two of these points are
used as anchor points. And all of these segments, these segments here,
the five segments, have their length being
as much as possible maintained with the
high strength value. Alright, so are putting all of these into one
merge component. Then let's see. Now on one thing also
before running the script, the output of this is obviously the curve and then the lens. And then here I'm
trying to check with these lengths if they
are maintained or not. So all of the points, including anchors, are given a load. And you see that it just
barely nothing happens. If I zoom in a bit, it looks like it's sagging down slightly. And you see when I click and
hold on the Reset button, it resets the result to 20. And then once you release
it, it's converged. Slightly more than 20. Result, I would say
is kind of expected. We have a big weight of 10 kg over a small
piece of cable. Even if, let's say all of the, let's say the joints are really well tied together
and it's different, strong would still see like
it's really small sag. That could be possible. But at least the lens
are maintained to be to the fourth decimal
place to be zero. So this also more or
less equal to 20. Right? Now. What if here I want now to change the strength or
the stiffness here. So I will copy this. I want to maintain the anchor
is stiffness or strength. But then now I make this a
bit less for the length. I also get this closer. This is now with nine zeros. If I change it to
1,000 and I take, I take out the six zeros. You see, it says more. And the lens now
are much different. Instead of 20 2017. Although this
difference is 1,000. And again, that's
because this is relatively a really high
value for the weight. Now, if I make this minus one, yes, as expected,
it goes up a bit. You see when you play
with these inputs, Obviously it updates
automatically, automatically and accordingly. One other thing I
want to show you, I'm going to bring these back
to these initial values. Considering that we
have this situation. And it was like barely sagging. Now I want to show you the target input for
the anchor points. What if we change
the anchor points? Now, these points, these
are the two extremities. And I want now to try to
move the anchor points. The insight, e.g. try to move
both anchor points as if, let's say you're holding
the cable with your hands, your hands being the anchors. And then you want to
move your hands to the inside or up and down. But then what would happen? What would we get? So I'm going to get
the point component. So this is like a shortcut
from these two points. And then I want now to release these two points
from the reference. I want to right-click and then click on internalized data. Once I do that, having the point component
with the preview on. And this is off. So it's showing what is on. Select the component. And now I can see the
gumballs of these two points. I can move them around. If I move these points around. Now, nothing happens yet because they are not yet
linked to the target. So the target means moving the anchor points
to a new location. Basically. Now, if I link these to the target, now,
what's happening? The anchor is moved
to that location. You see that because now the distance between
the two points, these two points is larger. That now as if it's not anymore reaching the end
of the anchor points. So these segments cannot
actually stretch anymore because we gave them a
really high stiffness value. So this is now like a straight
line between these two. However, if we
move these points, Let's say closer to each other, then we get a category
curve effect or chain. Out of that. Now you cannot actually move
the two points with these, these painters snap movement. Like in the x, z
plane. In this case. There's actually a glitch
inside of grasshopper. When we internalize
points, we can not only, you can only move
them along the red, blue arrows or the red and
blue and green arrows. If we were in perspective view. But not in the along
the planar snap. And because this difference is really high for the length. If we again try to
play with the value, if I take three zeros out, again, the movement
will be faster. But obviously the stiffness
would be less for these ones. So bear that in mind. So that's a quick example about trying to use kilograms
instead of Newton's. And I think that's it. That's the quick demonstration
about, about that. And now, what about
the pendulum swing?
7. Simulate a Pendulum Swing: This is the last
example I want to show you as part of Unit one as an introduction to
double-check about Hooke's law and its
integration in kangaroo. I'm going to now
turn these back. I will label this points,
internalized points. Alright? Alright. So these
are the points. And later on we're going
to look at meshes and how we should have anchor
points to work with meshes. Especially that the
starting location of anchor points must be
on the mesh itself. But we're going to
see that later. Anyway. But for this one, in this case, it works. So if I now take this out, it goes back where it was. And if I link, this will update. And I want to click
on the on these. I can now play with,
just stay with them. And also assume that even if
we add the graph component, this is the graph component. And I add it to the merge. And now I can even
grab these particles. I can play with these. I don't think I can
move the anchor points because these are anchor
points by definition. But I can grab
these other points. Alright, so let's move, let's move back to
the pendulum swing. I want to make this
preview off now. Now, what about a
pendulum swing? Can we do that in kangaroo? Let's try to see the behavior of a dropping weight
attached to a cable. Now the starting position
of the weight is not supported and the
cable is rigid. So keep that in mind. Would it swing back and forth
and behave as a pendulum? So again, you are
starting with a, with that, I'm going to go
back to the front view. Okay? So this is the point of origin. And I'm moving it again, 100 units in the x-direction. And I'm making a line. And now what I want to do is the first starting
point is the anchor point. Basically this is the
only anchor point. There are no two
points. The line. There's the string that is pretty rigid because
we want it to be rigid and we are applying a load onto the second point, not the anchor point. The anchor point is there
and the load is applied on this particle with, let's say minus ten. Change this to ten. Alright, I'm going to turn these
to preview on. And I will allow activate. Well, actually now I want to
see depending on behavior, also with both solvers, the normal solver and
the bounty solver. I will turn this on, reset. Uh-huh. You see here, I think this is the
one that is about C1. This is the standard one. So it's like an inverse.
Then stopped and the length is now at 10001. This is now a swinging. Hopefully that it will not stop. Okay. So it's like a
pendulum swinging. But it just stops there. I thought it would
swing a bit more. Let's try to play
with this difference. Maybe. If I change this
difference to, let's say 100. Okay, he had swings much more. So you see this difference
affects the behavior in a way that when it's like too
strong, it is like the, the point is pushing
too much or trying to maintain this distance
that when it's swinging, it is also the same time pulling hard towards the anchor point
and then stopping sooner. If I make this, let's say ten, its
wings even more. But obviously the length
of the cable is now 101. This now they converge. One is 101. So it's like if it's longer
than the original 100 length, I'm saying 100 length
because we know that when we move to this point away from this point by 100 units, That's why I know that it
should be 100 and not 101. What if to maintain
the stiffness? Maybe one-thousand. Keep it back there. Let's see if we can
change the weight of it, but not too strong. Okay. You see so also because the
weight was relatively small, like only minus ten
fingers, relatively slow. When I give it a
little higher weight. Actually, solving faster
and more actually. So this is now one minus. Then when I add two zeros, 1,000, then it's
faster. Obviously. Now it's also pulling more because there's more
weight that's pulling it. This is the conversion
one. This is the MS1. Also you can play with
this forever to also affect the behavior to make
it actually more or less. So this, let's say with
more iterations per bounds. And when I increase, the value becomes faster. I mean, I personally
like this one. It just depends on what
you want to do with it. Okay? So that's basically it. We saw how we can perform a pendulum swing with kangaroo with these
parameters and components. And I think that's
it for Unit one.
8. Learn how to simulate a Catenary Mesh: Welcome to the unit to class. In this unit we're going
to learn about mesh. So this is like a follow up
step from unit one where we saw how we can simulate a catenary arch or
a catenary curve. So now we're going to take a look ethical
quandary mesh and also have a quick case study analysis inspired by Frei Otto's
tensile membrane. And more specifically from the project the German
pavilion export in 1967. This unit is divided
into two main parts. The first part, which
is the Cadbury mesh. Then the second part is
the case study inspired by freight autos and cell
membrane structures. So let's start first
with the category mesh. In this part, as we saw
before in unit one, we saw how we can simulate
the catenary curve or arch. Now, what if we had a mesh? As a first step, we need to know how
we can describe the size mesh from Kangaroo, Kangaroo to in order to
understand what we want. Here. This whole part
is made inside of grasshopper. All of this one. There are no reference
geometries from Rhino. Only these layers are what I will be using for
the second part. The first one. Okay, so here what
I started with is a plane surface from
within Grasshopper, from surface, primitive
than plain surface. And then I gave, I gave it the
size of x and y minus two, minus ten to plus ten. So it is going to be
20 in both directions. And then from this
plane surface, I extracted first the
points, the corner points. Because I need now to
these points, basically, my main goal is that I
would like to imagine that this is a plane surface will
drop down like a turnstile. That's what's going
to happen actually. Like a wire mesh. You can imagine it. And the only be held up by
the four corner points. That's the main idea. So for that, I extracted the four points with a
deconstruct be rep component. So I got these four vertices and I converted the
plane to image surface. And the value of ten for the UV. So 20. And so now this is
the output of this mesh. This is a mesh here. These two are like shortcuts. I could have also done
that like directly, like this, but just
to make things clear step-by-step so you
understand what I'm doing here? So we have the points, well, these ones, and
we have the mesh. And so to run this simulation, we need first the four corner
points to be anchor points. So I got an anchor point, an anchor component
from kangaroos goals. The first one. And I'm using here the first anchor point without a target. However, show you later when we actually move the
points, what would happen? I'm giving here a high
strength of 1 billion value. Now the thing is that you need
to be aware of is that if, let's say we want to
give a number that is even higher than 1 million, let's say with nine
zeros or more. If you use the only the
number of stator like that, you bring one and then you
edit it and then you try to. So let's see here,
let's say nine zeros. So these are 969. All right? You see that doesn't
give us nine zeros, but only up to 1 million. Basically. That's
what's happening. So I can do that. Actually. The thing is that if we want to make like
even higher numbers, there are two ways. Either you can use a panel, is simply panel with as
many zeros as you want. Just bring your
panel and then write whatever number you want. Or you can, instead of doing, doing that, you bring
a number slider. You can actually double-click
and then type your value. So 3456789, Enter. And so now this number is
Slider can give us this value. Like big value that is actually not given by
default when we start, when we started to like,
you know, the other way. That's for you to
know to be aware of if you want to do that. Because in some
situations, actually, when you have, let's say
like really big geometries, the scale is too big. They won't million
might not be actually that's enough to maintain. Points in their places for the
anchor, for the anchoring. And then you might need to use such high values for the
strength of the anchor points. So we have the points now
that work as anchor points. We have the mesh. Remember before
the catenary arch, what we had, we had to divide
the curve into segments. Right? And then we
gave for each segment, part it straight segment part, the component for
the line length. We used this component from Kangaroo to maintain the
length between the points. But now we don't have, let's say single lines, but we now have the whole mesh. And so for that, we have to
use another component that would affect the wire off the mesh or
otherwise of the mesh. Basically, we can use it this edge lengths components
also from kangaroo. This is especially
made for meshes. And so in this case, now we can use this one and
you can input the mesh here. So instead of the line before, it's now the whole mesh. The length factor. The whole mesh where we specify how much the
mesh would stretch. Literally a length factor
with one equivalent to 100 length factor and
this strength as input. And so once we have
the forces between the mesh wires to be now
controlled, with this one. We have the points
that are not working as anchors are still
missing the load. I'm going to first run this simulation but
without the loads. And also I mean, this is like a new load
component, by the way, it's not like the same as the one that we used
to have before, which was the other one
coming from Goals points. So this is the
load, this new one. But now going to use the
vertex loads because we want to apply those to all of
the vertices of the mesh. Alright? But before that, let's just run it without the vertex loads. So I have this, this is the
output of the bouncy solver. And so to initiate it, I will turn this to true. We set it as the first look. Nothing happens. Why? Because we're actually giving if value of one for
the length factor. So it's not changing
anything about it. So even if I change
the strength, nothing will happen
because it's just trying to maintain the
length factor as it is, that girls are not
changed, so that's fine. Or if I change the
length factor, you see what happens now. Now we're having this
reaction that's happening. And of course I can change
the strength as well. Let's try that. Strength is zero. It won't change anything, but I gave it at
least a value of one. And then one is enough. We could use the
value to ensure that the lengths are maintained. Alright, so now we're
having this effect. However, in real life, this will be hanging, right? So we can add the vertex, the vertex loads here. Now these are actually positive. If I change that to negative. So we get this behavior. And of course you can go
back and play with these. Maybe let's say we want to the length factor to
be bigger and then the loads to be less
powerful or more powerful. So this means that
actually the length of the resultant will be larger, around 1.5 times the
original length. Basically. Or we can say No, actually
want them to be less. It depends on what we are
doing, what you want. Or actually, I mean, what is the property of the mesh itself? How much it can
actually stretch. And now comes to show you
when it comes to temperature. But this should show component, what's called the
show component. It will actually
add the geometry connected to it as an
additional output. So if we try it now without the show component and check
out the solvers outputs. Currently we're not getting
lines or only getting lines, or have the particles
out of the V, the vertices output and then
the output from this side. That is suppose for this other supposed to
be for geometries, it's only lines now. So these are separate lines. If I now connect the
show with emerge, now I get one mesh
and the lines. So now the mesh becomes part
of the output geometries. This is actually a certain
history with kangaroo one, where in kangaroo one solvers where we
had two input here, the measures geometry,
e.g. in this case. And then we would get the
mesh as a geometry output. But here, since we don't have anymore the geometry input
for the kangaroo two, that's why we use the show. Now. Instead, this will
not only show us the mesh, but we'll also have
it as an output as a result of output. Okay? So this is basically a quick example of
the kitten 3D mesh. Now the thing is that the
resultant behaves like a net. That's what we see
from the result. And the quads before
the original quotes of the mesh become diamonds. Basically. So it behaves exactly
like a wire mesh. But what if our geometry
is not a wire mesh? It's made out of another
type of material. Maybe it's like a
piece of paper, e.g. or like a rubbery material. In that case, that behavior actually it would be incorrect. Let me explain a bit more. This quad area of the paper or the rubber surface will
not behave this way. And so in this case, we would need to
maintain the diamond, the diagonals
basically inside of the original quotes so that
we don't get this sum, something like more
quality than diamonds. All we're always having
force applied to it. Pushing downwards or
upwards, et cetera. So in that case, so this is a catenary mesh. But now if they mentioned is
made out of rubber or paper. So what do we need
to, to maintain the shape as a
material continuity, basically, it's the same
start, same components. So the points, the mesh, the same thing will always have these points
as anchor points. We have the edge
lengths of the mesh. We have the vertex loads and also the show
component as well. So until now, we have the mesh that's
giving us Diamonds. Until now. But we can add now
to the recipe in new kangaroo component
equal lengths. And so this coming
from kangaroo too, goals, goals line equal length. And then we want to part of
the discretization step, which is converting the
geometries into parts that are understood by
kangaroo as points, as anchor points
at mesh or wire. We want now also in
addition to the mesh, we want to explode
it on the side and parallel to
extract the vertices. Here after the mesh explosion, we have single phases. So here we can now test
what we want to do. Only to one face first. And then after that, once we know what are
the correct steps, then we can apply the same
step to the whole mesh. So first, I use this list item, and then for the index
I keep it at zero. I get deconstruct mesh. And then extracted
the four vertices. And then I constructed lines between the first and the third, second and the fourth. Like that would not really make sense if we use
the outlines like here, but more of the diagonals to maintain this trend,
the lens basically. So these would actually
stop or prevent the face from deforming
in a diagonal way. So these will actually now
give us these diagonals as forces which will be added to the recipe
for the simulation. Once we found this, we don't need to
use the list item. Then directly. We do this. So this part is now
replicated here. Okay? And now we can see
the tree of all of the diagonals of
every single phase. And then these lines, we will put them in
a merged together. This is also like a small
shortcut of the diagonals. Again, this is not a must-do, but to make all steps
clear to understand. And then now I'm using here
an equal length component, but obviously a previously, I also tried to use the
length line because we use this one previously
for the catenary arch. Remember we use, we use
this one back then. Now, if we do actually
use this one, we don't get the
expected result. Let me show you what, what we get if we start with this one. So let's connect it
to the marriage. Then I click on
this one and reset. It does this. Now, we actually want
to have this effect. Maybe like somewhere,
sometime, I don't know. Just to show you the different the behaviors of
these components. In a way, what do we see here? This bag? It introduces like
new lines as if newlines are added
for each phase. And that's why it's not
really doing what we want. Now. You could actually want, you can see now that
these are actual lines. And as if it was like
a truss system anyway, which would be something
that we might want. But we don't want that for now. That's why I will
now take that out. And I will link
this equal length, which will just
maintain the lengths of the diagonals of the quads. And so now it's
maintaining the diagonals. You see now it
looks like a piece of paper instead of a wire mesh. And you see that now
here this corner quad, where it was more
like a diamond shape. Now it's not anymore a diamond. But now the result of the geometry is what
we're expecting. Basically. We can always
play with the loads. So basically, this
is what we actually need for this effect to work. Otherwise, if I take this out, we get again the wire mesh
like in that behavior. So basically this is how we can, without having to add like any material
properties similar to other plugins where
you can specify material properties,
densities, et cetera. Here, just to the quick
geometry thinking, we can translate that into kangaroo components to find the form that we
are looking for. This is it with
the category mesh? Now, in the next session
we're going to start beginning with the case study following up on this example. Thank you very much and see
you in the next session.
9. Tensile Membrane German Pavilion Expo 67 Frei Otto Case Study Part 1: Welcome back to
the unit to class. Last time we left at
Unit two and we were looking at the category
mesh and how we can build a cadre mesh
with kangaroo physics. Now we have the case
study to look at. I'm going now to reset this one and make sure that
this is false and reset. I'm going to disable these and white now
to enable these ones. That's because they're a
bit heavy to work with. And just the cookies to worry
about the tensile membrane. It is historically
inspired by some of the first manmade shelters, such as the Black dense, first developed
using KML leather by nomads of the Sahara desert, Saudi Arabia, and Iran, as well as structure is used
by Native American tribes. Structures offer a range of positive benefits compared
to other structural models. And so first, before
starting with the example, I'm going to show
you these photos. And the idea of this step is not to precisely
replicate this example. That's not exactly the idea. The idea is to find
how we can mimic this geometry looking
something similar to this one. And later on. You can then of course, if you have the correct
or precise lines of this and the heights
of the columns, then you can replicate that. But our main goal
is not to spend too much time on exactly
replicating this shape, but to try to do
something similar, I'll show you here
a few examples, few images I also found
through my research at this interesting
case study about the project by Spanish students. I think most likely university
projects about structures. And so they are showing
here like a case study of the mesh of the tensile
membrane with the holes there. And so it's important also to notice these holes
in the images. The holes are not totally
a parent or a possible. We can somehow see them. But the image would
suggest that there are maybe part of the mesh
or something like that. But actually these are
holes and they seem to have different materials
that are inside membrane. And so basically you
can see here more clearly the membrane
and the holes. So close this. And going back to the Grasshopper
definition. Alright, so I'm going
to talk about these, but after we cover the
first part of the analysis, I'm going to expand this a bit. So basically, what i followed
as a strategy to mimic this example is to do
it simply step-by-step. So for step one, we are now simply
building a flat mesh at the starting point here is similar to the previous example, where I'm starting with a plane surface and then I'm converting it into
a mesh surface. And also extracting from this
plane surface the vertices. So this one here, look at the preview. So I have a plane surface. And then the points here, it's converted into a mesh. Again, this is also like
a short shortcut of the mesh output of the
base anchor points. And so both of
these are extracted geometry parts
elements that we need now to connect with the
kangaroo components. So here I'm using first the
flat mesh for simulation, only the anchor
points and the edge lengths for the
limit for the mesh. And of course, the show to
have the mesh as an output. So if I now move this
one, they're a bit. We have this one. We have the show,
the anchor points, the edge lengths as inputs. Once we run the simulation. So we get this effect. This is now happening
to a flat mesh. Basically without any loads yet. I'm not going to play
too much with these now because you have already seen
this in previous examples. Now, the second step is
to move the anchors. What I'm doing here as steps, I'm just copying this, Let's say first step
down and then adding more components than
copying the step-down. And I think more
components, etc, to make the process easier to understand and more controlled. And then you can go back and
play with each step alone, double-check what's
going on there. And if you have any
doubts or curiosity about what would have happened if
you change something else, then you can also go
back to these steps. The second step now is I want
to move the anchor points. And the only difference
between this one, the step and this one, is to add the target points. Basically, these would have done is that I simply copied it. So Control C, Control
V to paste in place. And then I moved up, let's say with holding
the Shift key. And then I right-click on it
and select internalize data. Once I do that, I can now turn this preview on and
I take this out. And then now I can move these around inside of
the rhino viewport. So this is what I've actually
done with these ones. I can now turn preview on. I will delete these ones just not to get
confused with them. So as I said before, we have the anchor points and
the edge lengths. And I have now these internalized target
points before they were there. And now they are here. Just wanted to check if
there are other components somewhere that maybe may
have their preview on. Let's check this out. Maybe these ones,
now these ones are, so let's turn this off. Alright. So we have these base points, these base anchor points, and then these target points. If I don't use it, if I don't
give these yet as inputs. And I now look at this result. If I turn this to true. So that's the effect that we get without changing the
base anchor points. Now, if I now input these new target points
to the target input here, now I get this result. And so basically, what's
happening here is that these points have moved
towards these points. Now what is interesting
as well is that now we can play with these
in the viewport of Rhino. So that flexible. Always make sure
that this input here is preview on and then
you have this off. And then you can play with
these with the cursor. Alright. This is small note about not
making the value to zero. Otherwise you would get
weird behavior of the mesh. If we tried to do
that actually here. So I'm going to reset this one. And if I bring this to zero, so the strength is
zero and I run it, we get something like that. I mean, even without using
target points, we run again. So there are, there
is no strength, let's say that is
affecting the mesh. That's why we get this. Once we increase a little bit, then we get this result. So that's the only
thing to be aware of. Maybe that you leave
the input here at zero and then
you see nothing. So if you do that, if you keep it at
zero, then you run it. And you play with these. Click on these and
move them around. That looks like really
weird behavior. That's only moving these points when we have target points. Otherwise it just doesn't
do anything actually. So that's the only
thing to be aware of. So I'm going to change
this, connect these ones. So this is the second step
with moving the anchor points. Now, the third step
is to add loads. Well, adding close to the mesh itself, not the anchor points. I'm going to now to
turn preview these off. And I'm going to turn
this preview on. And these on the base points
and the target points. Then here, the only difference
with this one is that I added this vertex loads
component that we saw before, which especially which
was made for 3D meshes. Why? Because now this
load is going to be applied to every single
particle or vertex of the mesh. And it is like as if the mesh, they tend cell membrane
itself has its own weight. We talked before about kilograms
and the uterine units. You are not going in depth into this topic trunk to find out exactly the strength
of the values. Because now we're
just working with it virtually without a real
physical reference. However, later on you
can definitely use specific values as per
real weights involved. Alright, so I'm going
now to turn this on. And you see now I
have not yet used the target points as
input for the target. Let's see reciprocity between these two inputs and the
strength of the edge lengths. So the strength of
the mesh itself, how much the mesh
itself is strong to maintain its integrity
is geometry. And the vertex loads
force pushing, in this case downwards. We're using here
a negative value. So let's say I make
this value less. You see, we get this behavior. You see when I use a negative
value, it pushes upwards. And then, and then when I keep going as if it's mirrored effect
with the x plane. And so the inputs are
controlling the length of the mesh wires simultaneously
as we change them. And this is the length factor. So it's as if the length
of the wires is at 67 per cent of the original
mesh and not 100%. Otherwise. If we decrease it, it becomes more stretched. I will for now keep
it at this value. And then now when I play
with the vertex loads, if I increase this
value going downwards, so it's a greater
negative number. So increasing the force that is pushing the mesh downwards. If I change this to zero. But we'll go back to flat because there are no loads
being applied to it. Now if I change this
to a positive value, we get this inverted effect, like the catenary arch
versus the cathodic curve. Alright. So just keep this in mind that these perimeters work together
affecting the simulation. As according to the situation or the properties of the
geometries involved. We'll have to tweak these
parameters in order to have correct or
logical results. Depending on the situation
and what you have set up in what is involved
with all of these jump trees. Now if I connect the
internalized anchor points, we get this result. And I can now always move
these points around in 3D according to the
needs are required. Alright? So this is about adding loads.
10. Tensile Membrane German Pavilion Expo 67 Frei Otto Case Study Part 2: Now the final step, step four, is to define the
base and the top anchors. Let's go back to the
images of the pavilion. If we look at this actually from a
geometric point of view, as you are now working with
kangaroo and its components, who are familiar with the
anchor points right here. What we can imagine that
if for this example, we want to duplicate
this example precisely. I would imagine that this
would be an anchor point. Somewhere here. It would be an anchor point, maybe this point as other
anchor point, this one. And so then the whole
membrane is the mesh. And what about these points? What about these tips here? These are also anchor points. So these are new anchor
points that are not like the normal anchor points
that are at the base. But now I would actually call
these top anchor points. So now we have the
base anchor points and the top anchor points. This is now the new things
that reduced in this example, which is now base anchor
points and top anchor points. I will close this and
go back to our example. Now. So far, anchor
points are used. By definition, points
that would usually anchor the geometry to a certain base or to the ground, or to a wall. And so far the anchor
points are external. So what I mean by this is
that they are anchoring the mesh with the chosen
external vertices. But for us now to define base anchor points
and top anchor points, we need to introduce new, well, more anchor points
maybe in this area to push now the wave
from this mesh. So let's see how
to achieve that. Let's go back now
to the step four. So again, the same steps here. So we have the mesh vertices. In this case, if we
go back to the image, we don't have only four points, but we have many more. Along this side. We have 123456 anchor
points roughly. So that's not only two
points but six points. And so here I would imagine
several anchor points here, several anchor points along
this side and on this side. Right? And so in this case, this component doesn't
really work for me. These four vertices are not enough for me to
replicate the example. For that would need
now to extract from this mesh certain points. And in this case, I'm using the deconstruct
Mesh Component. Similarly to deconstruct be rep, but now with the mesh and
we're getting now all of the vertices as an endpoint that you can use
as anchor points. And so here what I've done
is that I used a list item. So from the output
of the vertices, I used the list item and I
played with these inputs. Now they are not exactly the anchor
points of the pavilion, but rather a quick mimic
of the overall shape. As we said before, it's
more about the concept of reproducing this effect rather
than precisely copying it. So basically here by using the merge with the
multiple values, are able to choose
several points based on their index number. And then use these
afterwards as anchor points. Here it was first done step-by-step until I got
all the points in place. You can choose these ones. All of these indices. Want to choose
them step-by-step. Then I can check where they are and I can make sure
that it's working. And then once having
all of them set, now we can connect
the merge there. You can always go back to these and change them obviously, but make sure that they
are always external. So for now, just keep
these as they are. And of course, you can always come back to the
number of sliders. Here I used a new
shortcut to make it easier to manage and to
make things clearly explained. What a lovely to do
that you can also directly connect them
without any shortcuts. These are my base anchor points. Okay? Now for the top anchors, what I'm doing is
exactly the same thing. Extracting from all of
these vertices of the mesh. New points, but now
in the internal area, alright, not along
the external edges. With this multiple
values for the merge. And I call these as
top anchor points. Now, all of these
points are still flat. So it's exactly going
with the same process. But now we have
two anchor points, component to anchor components
basically not only won, one for the anchor points of the base and one
for the top ones. The anchor component,
one for the base acres. We have this show. We have the edge lengths for the mesh
coming from the mesh input. Here, we have another
NCL component for the top anchor
points for these points. And now let's run
the simulation. If I turn this on, we'll also turn the Preview on. We get this. Actually I'm
going to turn all of these. So the base points are on, the top, anchor points are on. And you see it kind of stretches the mesh towards these points. But these are still not the top. I mean, not really
moved upwards yet. And so in this case, this is where it comes handy to
use the target points. So here I will use the
internalized drop anchors. As I showed you previously. We can copy this component here. Right-click, click on
a generalized data, and then now we can move them. Now we have more
of them like this. I would see nothing happening. Why? Because I still need to connect these ones
with the target input. And now I'm getting
something similar to the example we saw
in the images. Maybe I want to move
this one downwards. Let's check. Yeah, this one,
This one upwards. You suddenly starts to
look like the image. So I have actually done this
previously with these ones. I'm going to connect
these ones there. So this is not a perfect
replication of the example, but it is following the same
result, the same shape. Okay? So that's basically it. It may look a bit complex if
we did not see the steps. But now as we know
what happened, the detailed steps, it doesn't look too
complicated to us. But if I showed you this final
step as a starting point, it wouldn't be obvious why we have two anchor
points components, why we have all of
these components. It might not have
been intuitive. What now as we went step-by-step
with the flat mesh, then move the anchors than adding loads and then now adding more anchored components as top anchor points and
base anchor points. Now it makes more sense. Now you see that the behavior
of the mesh is interesting. If I rerun it, it's like a nice slow
bounds of the mesh. You can always go
back this input here. We didn't really play with it before with the previous steps. But now you can get
a number slider, let's say 1-10 with
integer numbers. And then you can change
the bounds effect. So if I change this to six, you see now it's much faster. Let's try with them. So it depends on
your preference. It's really personal preference, which affects you
would like to see or how you want
things to look like. Does that for now. Let's bring it back to six. Alright. Now, what if I was actually
thinking about that? Well, we saw before that we can actually add vertex
loads to this one. Previously to make it sag. Here, will not do that yet. We only use the anchor points
and the lead if the edge lengths without the vertex
loads and so forth. This result, I'm going to now add the vertex loads
and see what happens. To be able to compare
with this example. So this represents,
as we saw before, the weight of the
tensile membrane. If I connect it,
sags down a bit. And this depends on this value. And this value
represents the weight. So once we know the exact
weight in real life, how many kilograms,
as we saw before. Now we can convert
kilograms to newtons, and then we can give this
value here as a negative value pushing downwards to be the weight of the
ten cell membrane. If I don't connect it, it is as if the membrane
doesn't have any weight. And the shape of it is just only being formed
by the mesh edges. How strong the mesh is to
maintain its geometry, integrity and the anchor points. If I add the weight, the vertex loads, we have now, let's say a more
realistic result. And then what about, by the way, this is now a new component. What about we have windy day? So what would happen? And so what is
interesting is that we have this component
which is called wind from kangaroo
two from goals mesh. This one. And so basically for the wind, when you bring a
new wind component, it needs a mesh. So the component will now
mimic a wind force onto the mesh with the wind vector
in a certain direction. In this case, and I'll
give it a z-direction. But you're both x
or y vectors work. Here. I used an x vector
with a value of 50. And if I connect it, you can see that this is
the number of slider. Now it's low in the
other direction. So we have, let's
say -52 plus 50. I found these values in this
example to be the maximum. Otherwise, if I
change this to 100, it would not really work. It would kind of break. Let's try with 70 and
then reset this one. Alright, now let's push it
and see what would happen. It doesn't break yet. Okay. It looks like it's
going to break. It broke. Let's see what about
the mesh strength. If we bumped the strength here, maybe that would
reinforce the strength of the tensile. Could be. Okay, it doesn't break. Let's reset. You see that? We have to play with these. If I now decrease
the strength input as if I'm telling
it that it doesn't, it's not really strong
enough, then it may break. Okay? So I'm going
to bring this back, to reset this one. Bring this back to 50. Alright. So this is presented
as an example. And it works. Now, what if, What about we want to be more flexible
about these points? E.g. imagine that
the mesh changes, maybe the subdivision
count changes. And then in this case, the points will not be the same. Because as the god of the
vertices would have changed, then the choice of indices would then need to be
adjusted accordingly. Which would become
rather a manual work. Which is not really like
parametric speaking. But there is another
way which would involve geometry
referencing from Rhino, which would make the workflow
more flexible and faster. And I think it's more precise. So I will turn this off.
11. Tensile Membrane German Pavilion Expo 67 Frei Otto Case Study Part 3: And actually it's the same, it's the same step four. Step five as we are
not adding a new step, but rather changing a bit. The demarcation. What we have done here, instead of using this method, I'm actually now
going to use here these curves that I
actually drew before. So these closed rectangles are actually drawn to be encircling some
vertices off the mesh. And so the red ones here, the red layer is for
the base anchor points. The blue ones will represent
the top anchor points. Okay? So it is the same thing
basically like here. And now the output of the mesh here will be to
construct mesh again. But instead of now using a list item with all
of these values, I'm using point in curves component coming from curves analysis,
pointing curves. And I'm using these curves. These curves, the curves
inside Anchors base. And then I'm using
inequality, equality, which reads the results from the relationship
from the point. So if it was out, 01 coincides and to inside. So I want to find which points of these
vertices are actually inside of these
curves, these ones. And so I get now this relationship
results which I connect with the
equality component. So coming from math, equality. And so which ones
among these results? Or equal to two? Basically. And then now the last step
is to use this dispatch. And then I'm using this
output from the vertices. And I'm using this
quality, which is true, false results to extract only the true results
equals to two, which are the ones
inside of this. And then the outputs
will get the list, a list to be the true ones, the false ones,
and the true ones are these points basically. And so these are the base acres. What is interesting now
is that I can get back to this layer and I can
turn on the preview. I can change the anchor
to be not this one, but sorry, need to
turn on the gumbo. This one, e.g. or this one, depends on which one
you want to use. Alright. So these are
the base anchor points. These are the top anchor points, again with the same way. But now what we're using,
now, these curves, the blue ones, to test which ones among these vertices are inside of these curves. And then I'm dispatching the
list to get only these ones. Again, I also internalizing them to move them upwards
to really have top anchor points and then have the other ones as
base anchor points. What else? Before now proceeding? I would need to have like
a final step here to add, which is not included
in the previous one, which is to have
holes in the mesh. So if we go back and
look at these images, we see that there are
holes in the mesh. If I flipped through the images, we can see these ones
look like holes and might have other materials that
bring light in without having, let's say rain to go and
maybe glass or plexiglass. And this interesting study of the project shows more clearly these holes in the mesh. So how can we have
holes in the mesh? Alright? And that's
pretty simple by simply calling some of the
mesh faces out. Basically. That's the last step
that we have to add before using the mesh input
for the edge lengths here. And so for this mesh, the original one, I'm using
a mesh explored component. Then I'm extracting the mesh
area for the image explode. I think you need to
install mesh edit plugin. Have already
received the list of plugins required
for this course. So make sure to install it
before you open the file. Because if you open to without having the plug-in installed, then you will get
an error message mentioning that some
components are not available. You cannot see them because you don't have the plug-in
installed already. So please make sure to
have that installed. And so we're doing an
explosion of the mesh first, which gives separate phases. As a result, it actually
looks the same. But now we have the faces
separate with 400 faces. And then I'm using this
area to get the centroid of these faces, these points. And what I'm doing here is doing something
similar to this step. I'm using pointing curves
component as well. And I'm using these curves. And then I'm saying that these
ones, please choose them. And coal faces, so-called
the faces that have their centroids inside of
these curves out of the, of this mesh basically. So when I do that,
I get the result. And what is interesting is
that we can now change this, this selection later on, even while working
with the simulation. So I'm going to keep
this as it is now. We have called these
faces out from this mesh. And this is now my mesh, my hollowed out mesh. And now I can use this for the geometry to preview this on. Let's check this out. This one. Turn this on for the edge
lengths and for the wind. Okay, Now before using the wind, without this, let's see what result we will get
when we turn this on. If I bump this a bit, we can make it faster. You see now we get this result. As I said before, working
with this is flexible. It's actually we can, what you can do now
is let's say if I want to move this
hole in the mesh, maybe there, I can
simply move the curve. You see how it affects the mesh. Maybe in other situations I
want to make this bigger. I want to capture
maybe more faces. It really depends on
what you want to do to achieve what is your goal. Maybe I don't want to have this anchor point
as a base point, but the neighboring one. No, you see it did
not work here. Why? Because I did not say
hit or match the point. If I turn this on, you see it did not headed. So if I move it there,
it'll bring it back. You see? So if I move it out, It's not finding any
point. It's not working. If I'm over there, it
will find that again. So that's what I was meaning
about being more flexible. We're now using
reference geometries from within Rhino
to link them with Grasshopper to make
kangaroo understand that these points should be
base points or not, or the whole should
be there or not, etc. I'm going to now
to undo what I've done here to keep the
example as it was before. Alright, I think
that's how it was. Let's turn this preview off. And again, if we
add here the wind, we will get this effect. This is using the y-direction. Alright. I'm going to turn
this preview off. Now, one thing or issue that
we have now is that the mesh itself is not totally
smooth as it would be. In other words, this step of smoothening of the mesh could
either be like an easy, straightforward step or
it may need, let's say, more work to make it look like exactly how we
want it to look like. Now I'm not going to spend much more time to
perfectly solve it. Exactly as smooth
as it would be. But it's technically
about showing you how we can achieve this initial
result with kangaroo. The second part of the work would be more working
with the mesh itself. But there's actually a
quick step that we can try, which is weavers components. So in this case
I'm using a weaver birds got more
Clark subdivision. But before going there. And the output here is the data. So all of these are database. And I want you to extract
the mesh because as we saw before when we had
the show on and off, we had the mesh with
a lot of geometries. And actually this is
still running by the way. I think because of the wind. It keeps blowing on it, preventing it to
converge at some point. I will take this out for now. Anyway. So if we have a lot of
outputs other than the mesh, I'm only using a Mesh Component and then cleaning the
tree with the remover, nulls, Invalides, and empty. All of these would be true. And then I have only the mesh left out as an
input as a result. Now it's working fine. And then here I'm
getting this component. The weaver birds got
more clerk subdivision. This is a quick description. It says calculates the
type of mesh based on recursive subdivision
described by Edwin Catmull and Jim Clark
at first and their paper. And then the
resulting mesh always consists of Quad faces. Okay, So that's what we
have to keep in mind. Otherwise, we can also use other components like this one, which will have always
triangular faces. In this case. The sentence in the middle
of the second line, the resulting has always
triangular faces. While here it says it will
only be quadrangular. Now, when I click on
this, turn this on, you see now it's a bit smooth and here are interesting inputs. If I use this as fixed. So the smooth naked edges input, it says defines how to
treat the naked edges, the external edges,
and also these ones, because these are also
considered as naked edges. Either fixed. So naked edges will not
move or be modified. And in this case, at this point, that is pulling towards these points are not
considered as naked edges. And actually you can look
back into these images. You see that here the
membrane is cut and then there is a structural
column continuing. So also here. In the same way we can later in more
developed status, we can cut the mesh here to make it look
like in the image. And then we can of course continue with the
lines and the curves. And so the first option is to
have this fixed or smooth. So the naked edges would
tend toward a spline. You see. But now this became smoothened. Now if we look at the
images, zoom in a bit, these seem to be pointy, but actually the
base anchor point is much further somewhere there. For this one is obviously there. Or third one, corner fixed,
which means corners, two-sided vertices
will be fixed, while other naked vertices
will tend toward a spline. So the corners here are pointy. But the remaining ones
will be, let's say, more curvy, more rounded. So you can play with these
and check the results. Hopefully that this would give
you the result in intended without needing to add more steps working
with the mesh itself. Because that would
be take more time.
12. Tensile Membrane German Pavilion Expo 67 Frei Otto Case Study Part 4: Alright, in this step, it is kind of dirty to Kangaroo, like kind of continuation on what we have seen like
the simulation process. It is a visualization step
that I think would not only like visualize the results, but also enhance them, make them more apparent
and understandable. I won't actually show you the final result before
explaining how to reach it. Making sure that these are off. Alright? So the visualizations that
consists of adding colors to the mesh faces based on their
respective sizes or areas. The areas of the faces for
us to see now the result. Because I see nothing here
in the Viewport of rhino, I have to turn this on. So turn this the only
draw preview geometry for selected objects off. Like this. Then right-click and
show the select, Show Preview on the Select. And then we get, we
get this result. This interesting
visualization or a graphic of our resulting mesh. This is like a
really simple script here added to the output. Here we are. I'm just extracting the mesh
as previously shown here. So the mesh coming
out of the data, I want the mesh. I'm cleaning the tree because it has so many things
other than the mesh. Now we have only the mesh. I use, the mesh explodes. So I, if I go with
this step-by-step, we have the mesh explode. I'm extracting the
phase boundaries. I'm exploding the boundaries. And I am here from the
vertices of the boundaries. Building surfaces not mesh. Then finding here the geometry. So basically the areas of these surfaces from the
area output abusing pounds. And I need bounds. This one will give me the maximum and minimum
of all of the areas. So if I get the panel now
and check out the areas, we have all of these areas, but we need for the coloring
now to give colors. And this actually is coming. It's coming from
parameters, input gradient. We need the lower limit and upper limit and then
we need the parameter. So for the lower limit, after we extract the bounds, which is giving us now the
domain minimum, maximum. So from 145, etc, 293 or nine, et cetera. So we use this
deconstruct domain as a final step coming
from math domain, deconstruct the extract
these two values. Alright. So that is now so wonderfully
to the end is the 93. And then now here I'm using, I can now start. I can actually start with this, starting with the lower limit, and then this to be
the upper limit. And all of these areas will be the parameters for
the parameter input. Basically. Then I
get this result. Or as I did before, I
just switched them. So now what is happening is that if you imagine
that along this line, the gradient, we have
all of the values from the smallest 142
here up to the largest. It was like 9.309, right up to there. So something
in-between, everything in-between would be colored
according to these colors. So they would be in red. The biggest ones.
The smallest ones here will be in red as well. The bigger ones tending
more towards orange. So starting with red, magenta, purple, blue, green,
yellow, orange, red again, I thought it could be more interesting if I
actually flipped these, invert the results like that. So that's the smallest
ones are actually here, shown in yellow and orange. We can also use
another gradient. Now, we can go to the presets. We can select e.g. this one. I will also flip these again, lower and then higher. So this shows us that
the smallest ones are in green and the biggest
ones are in red. This could be less confusing
in terms of colors, because with the previous one, we were getting ready for both biggest and
smallest values. Alright, so the
greenest ones here are the smallest ones and
the yellow than red. And we can go back
to these ones. We can play with this, you know, maybe black and white
stood up to you. This is just like a
personal preference. Actually depends
on which kind of diagrams you want
to get out of this. In any case. One thing you would ask me why aggravated the meshes
into surfaces. I could have also
gotten the mesh area. There's also this component, and I can use the same one. The thing is that the
graphically it will not look like this. Nice, like this one. What I like about it is that it looks with glossy or shiny. It has a nice shine to it
because it's based on surfaces. If it was a mesh, it won't look like that. It won't have the shine
that the surfaces provide. What would rather look more
faded or the linear way. You can try this later
if you want and check out how it would look
like with the mesh. But this is just a
quick explanation about the conversion to surfaces. Because this is only for
purely visual purposes. I mean, if Graphics
don't really matter, then you can surely directly use the mesh areas that without having to
use that extra step. Alright. So with this last example, unit two is completed and
see you at Unit three.
13. Thin Concrete Shell Heinz Isler Case Study Part 1: Welcome to Unit three class. In this unit, we're going
to look at a UK study. It is the case study of
Heinz easily as an adult, the attack could sing, and this is the
German pronunciation, which means the National
Theatre in London. And it is a thin concrete
shell structure. So we're going to
look at how we can actually build or
replicate this thing. Concrete shell with canker to physics and also
trying to mimic as well ions easily
as previous methods that he actually
used in the lab, like the analog one. But then we're doing this one. Now, the digital tools. Alright, so before we start to look at the grasshopper
file itself, I'm going first to show you the images part of
the course files. So basically, these are
the images of the project. And you see this is the shell. Obviously at this point where the shell is grounded or
anchored to the ground, it is much thicker than there. These are the
images from the lab during the analog
studies of the shell. And of course you can
see the anchor points or the anchor sides
of the shell. And then here also
other Rochelle forms that have been plastered. I found an interesting website actually where I
found these plans. And this one and this
one, these two images. This one and this one,
I found this website. It has shelves that
Princeton dot edu. And in this website they
have a nice article about this project and they have drawings about it and
a lot of information. And what is really interesting
is that they provide like many images and diagrams
like this one, e.g. as well as let's look
here. This one as well. And so from this image, I was able to trace out the outline of the base mesh on which we would run our study. So it's a nice opportunity that we can now try to test out kangaroo with the help of the sketch and see what
simulation results you would get. These are also informative
structural diagrams. So as I said before, kangaroo is not a structural
analysis program or plug-in, but more a form finding
plugin based on Hooke's law. Of course, if you want to dive deeper into these
structural analysis side, you can surely use
other plug-ins like a rumba or other ones
that are more specified. For structural analysis. Means, however, using kangaroo and not like
a structural analysis tool. So let me go back to here. I'll close this website and
you actually have it here. So this is the link in
case you want it to go back to it and check
it out again details. And so what I found
really interesting in this online article about
each layer structure is dimension of the
form finding strategies that are now trying to reproduce
in kangaroo virtually. But those days when these
structures were built, they were done in an
analogue way in the lab. So I chose these two paragraphs for you from the article
which I found really interesting as a historical link between when these buildings, these structures were actually
designed and what you are now trying to do by replicating
virtually in kangaroo, sitting on our desk in
front of the screen at trying to do something that would take us a few minutes. But back in the days, we'll take them hours
and days to test in the lab and then reach
the final results. So it goes like this. At the first Congress of the International
Association for shell structures in Madrid, 1959, is little
presented a paper that outline these new ways of
finding shapes for shells. These methods were first
that really shaped hill, secondly, membrane
under pressure. And the third, the
hanging cloth reversed. So the form of the network the attacker singing was
found with the third way, which isn't there believes is the most efficient
and accurate methods since the loads acting on the hanging model and it's reversed form are both
gravitational forces. The principle behind easily as Hagen cloth method
can be understood as the three-dimensional version of folks discovery
basket, a quotation. You see here the
mention of Hooke's law, which we saw in the
very first unit, that everything in kangaroo
uses the Hooke's law. So it goes further continue. A piece of the cloth
that is hung from several fixed
points would create an ideal form that is
completely intention. Over this shape is
frozen and flipped. The resulting shell should
be incomplete compression, which is convenient for
concrete structures since concrete performance well in compression but
poorly intention. The main difference
between the work of Gaudi and Islam is that the
Spanish architect found this form or this form through a network of
two-dimensional case and 3D shapes. While the Swiss engineer also
used one hanging elements, a piece of fabric to determine the ideal form of a
structure of quotation. Also see this reference to K2 reshapes or catenary curves, which also we saw how to replicate visually or virtual
actually didn't kangaroo. And as well as the
piece of fabric, which basically refers
to the mesh geometry. So I just wanted to make this small historical
link reference between what was done in actual reality and what
you are now replicating. And I could really imagine
that maybe back in those days that may be
both cloudy and Islam, or if they had those tools in their
hands back in the days, they would maybe have used kangaroo actually to
make their studies. Alright, so back to our example. What interests me
now is this plan, because this will help me trace the base mesh of the
project and then also try to find out at the
end the height of the shell. The thickness of the
shell will actually give the thickness to the mesh to
mimic the real project, etc. So now, as information
provided in the article, the span is 42 m. This image, we see that it is 42 m spanning in width and
then to an 8 m in depth. And then the height. When the geometry become
converged in kangaroo terms. Then it is 10 m high, and then the shell
thickness is 9-12 cm. Okay. So let's go back to Rhino. And I have here imported this image which was found
in the website, this plan. And actually here there
are two study plants. However, the end result
was based on this one. What we have in
this image, both, I'm now tracing this one only. I'm going to lock it. And
here we can also double-check the dimensions, the width of it. Let's go to top view. That from this point
to this point, it's around 42 m. Almost. Not like pinpoint
because it's like, you know, like a
sketch declines. Alright, and then the units
of the file are in meters. That's an important,
That's important. Okay, so once having done that, then we can trace
it in this layer. Here. This is how it's
organized in different layers. So we have the image
reference here, then we have the shell
plan, trace and mesh. Now at the beginning before
having this as a mesh, because all of these
are now meshes. Individual matches
are different ways. You could either
directly just go to the Mesh Tools and then click on this component and
then start to trace. That's something you
can do obviously. And here you have
to see after snap. Still, I think it may
not be, let's say, helpful this way to
make things that are straight because I'm not
able to snap to this point. So e.g. e.g. that's
one unit mesh. Careful to turn vertex
and zero point on. So that's something now
I can snap to this one. But maybe this one, this is not fully straight
because as we saw before, it was not snapping
to this point. So that's one way. The other way which
actually recommend to do is to just trace
first with lines. You can see here that this
man is symmetrical with this x being the
mirror axis, right? So we just need to trace this part and then
we can mirror it. And what I've done before is that I have traced
these lines like this. So that's the first one. Something like that. Look there. Maybe now I can hide this
one and delete, delete it. And then I got these two, these two polylines
and then after that, I would convert
them into surfaces. So planar surface like that, I did it the polylines I
have now the surfaces, then I have to convert
these into meshes. Mesh I can use fewer
polygons and then I delete the surface and then I am left out with the meshes. So that's how I
reached this result. If, let's say for any
reason you want to do it with the one
like trace the mesh, like the single mesh faces. If I do that, let's
say this method, you will not get these lines. You will not get these ones. So that's something to
not be worried about, just to let you know that this is how converting
surface to mesh, you will get these lines. Otherwise you won't get them. And so basically these are now the mesh faces
individual phases. Now let's go to grasshopper. Alright. So the first step is to reference these mesh faces with this
mesh component. Now, these two components are extremely important to
have a clean mesh before we start extracting from the mesh all of the
necessary vertices or use the match the mesh itself and other in order to use
them and kangaroo components. So before doing that, we need to make sure
that the mesh is joint and clean and so forth. To do that, we have
our first using this mess joint component from the native mesh utility
sub tab from Grasshopper. And then we have the
mesh Weld Vertices. It's coming from the same place, but part of the
mesh edit plug-in. And so you can see
here the difference when I check out
what's going on. So all of these meshes are separate
individual mesh faces. And then once I joined them, I get this mesh. It's one mesh with joint faces. And then what I, well, the vertices together,
then I get this result. And you see here, now we have a smaller number of vertices, which is good because otherwise, before we had duplicate
vertices, which is not good. It is not a clean
mesh to start with. Alright, so once having
reached a good clean mesh, then now I'm doing this discretization step of extracting the anchor
points, et cetera. Now for the anchor points here, we see from the image, maybe this one that
these sides here, these segments are
anchoring the structure. And I know here I can
spot them easily. These are the ones that I'm
anchoring at the ground. And so for that, we need to just extract now the points there that
would work as anchors. And so here also to show you in the layers of rhino,
we have also, we also have the
dimensions layer that I make to check
the dimensions. By the way, when I traced
it based on this plan. Based on this plan, when I had the width
of the mesh exactly to be at 42 m on these edges. I got it depth when this
gate was proportional to meet this dimension 28.5
and not when exactly, it should just let you know
to avoid any confusion. Here, it says to 8 m, but when someone wants to trace this one, you will get 8.5. It's not a big deal for us, but just to avoid any
confusion later on. Again, the main goal or purpose
of this case study is to replicate the behavior
of the thin shell, but not to meet the
final result vesicle. The vesicle results with
millimeter precision, since we don't
have the necessary information for that anyway. So for further
structural analysis, we would need other tools. As we mentioned previously. Alright, I said
before that we found these parts to be the
anchor points of the shell. And I drew this layer, which I call curves. Anchors just drew rectangles
around these sides. Basically. They don't need to be this super
clean rectangles, just closed polylines that include these parts
inside of them. And once I've done that, what I'm going to do
now is to extract these points from the mesh that are inside of these
polylines basically. Alright? And the step is easy. I think we've seen
this before as an, a previous unit. I'm doing it. Deconstruct mesh first,
then all of the points, the vertices, then this
component is referencing. These anchor points is
anchored, anchored curves. These are the curves
for the anchor points. And then I'm extracting
the relationship of these, all of the vertices
with these curves. And I'm only now interested with the ones that have
the result of two. Which means that these points
are inside of these curves. Which among all of these points coincide
of all of these curves. And then I'm using here
and equality component, which one's religion
is equal to two. And then I'm dispatching
this list of points and then I'm using this list a, which is all of the points inside of these
curves are polylines. And then I'm getting
these points. So now it's like a quick
way of extracting these. Then now I'm doing, I'm done with this step which is finding
the anchor points. And I'm using this component
for the anchor points, which we have seen before
coming from goals point. The second step is we want
now to define the mesh. And we want to
tell kangaroo that this all of this mesh is
one piece of geometry. One piece of mesh that we want
to maintain or we want to control the edge lengths
of this mesh basically. And so this clean mesh
that we got previously, the output here,
this is our mesh. And third step, we
have to also apply some vertical loads because otherwise nothing will happen
as we saw also previously. So we need now to
apply forces onto all of the vertices
with the vertex loads. And we saw that now we
are using this one for the image versus the
other load component, which was only for
individual points. And then finally, the
show component that will actually give us the
mesh as an output. Otherwise, without this one, we won't get the
meshes and output. And putting all of
these components will expand this one a bit. Being one merge component. And then I'm using
a bouncy Solver. Now, this was set to true. I'm going to set it to
false, to rerun it. I'm going to click on this, go to perspective view and
check out the results. Turn off these. Now click on True. You see that now
what's going on is that these points are
working as anchors. This is our mesh with
the edge lengths. And then the vertex loads
are pushing upwards. These have a positive value. Otherwise, if they
were negative, they would just sag down and if it was
exposed to gravity. Now if I want accelerate
the behavior, I can hear bump up the
value for the iterations. Let's say 15. And I'll bring, bringing this up
back, back up again. Because of course, what do you increase the
value more and more. Of course, it's going to
push it more and more. And so the behavior of this is controlled by
the vertex loads, strength as well as
the edge length, a length factor and strength. So if I bump this one to one or more than we see that now at the lengths of the edges are now longer than original
ones by 50 per cent or more. But I want to keep them at one, or I want to make them
at 90% or 70 or 60, etc. And there's also the strength
of the edge lengths. What I've actually
found is that when I put this one in top view. And one thing that we want to also need to
consider is the height. Remember that we saw that
the height is 10 m, right? So now in order for us to
match or find this geometry, I'll go to front view. And here I made the new, new layer called 10 m line. And with this layer, this line is a reference
height for us. Know what you can do
is that we can control our inputs here to make
it match this line. So maybe I can now drop
down the vertex loads. It looks like maybe at 2.5 more. 554, I think, was the value that was very
close to the line as well, basically now what are matching almost the original shape
of the concrete shell? Otherwise, we can also
play with these ones. But obviously, if we play with
the edge lengths too much, then we will get, let's say, a deformed geometry. More or less. Or in other situations, we can make it, we
can keep it at one. And then when we go
to the front view, then I decrease
the vertex loads. But in any case, I found this top view to look a bit farther than the
real shape in plan view, at least of this plan. That's why what I found here is a good combination of
parameters that's working to meet the shape
is to have this at 0.9 and then have this at 2.54. I found out that in plan, the resultant matches more nicely the curves here and here, obviously going to
push to the inside because of the shape
of the geometry. And if we go back to
this component of the boundary Solver,
click and hold, you will see how it starts and then it reaches the result. Click hold. And then and this is in front of you to
check the 10 m height. This is until now, like a quick demonstration
to show how we can quickly replicate this case study digitally instead of doing it in the analog way in the lab. Now, what if we wanted to give
a thickness of this shell? Because, I mean, obviously
this shell has a thickness is not like a flat
tensile structure where we would say that it ends. A membrane is super thin or it is more or
less zero thickness. Usually in kangaroo or rhino, who would like to give thicknesses of a few
centimeters or something. It depends on the geometry. But for tensile structures, sometimes we can ignore that
and we can keep them only. Keep the mesh faces
without thicknesses. But in this case,
these are mesh faces. We know that this concrete shell that has a certain
thickness of 12 cm. And so in this case, the output of this as a mesh, and I'm using clean three
because I know that here we have the output
includes many more elements. I'm telling the balances solver, I need to find, to find the mesh and then
clean this tree. So clean all of the empty, invalid and outputs or inputs, and then only be left
out with the mesh. Then now here I'm using
this weaver bird mesh thickens component coming
from weaver bird transform. And this one will give
the mesh thickness. And so from this, we get this basically. Now obviously we know that the thickness is
changing and it's not, let's say the same thickness
all along this mesh. But for now we're just using one thickness for
the whole mesh. On another thing that
we can also look at is the kind of refined
a bit, the geometry. And this can be done
with weaver birds, Catmull Clark, which we
have also seen before. So from this mesh, we can now make it more
refined, quote-unquote. And you can play with this
smooth naked edges input here. So to either have 01 or two
depends on what you want. Here. I'm using a level two. And then for the
smooth naked edges, this is at zero, means fixed. So I just will not move
or be modified at one. Smooth edges will
tend toward a spline. We can see the difference
here, here and there. However, in this case, even these ones will
be changed to splines. So this is not
actually what we want. Or two corners, fixed
corners will be fixed while other naked that
will tend toward this blind. And also think that this case, all of these work
except for these two. For some reason these are not
behaving like these ones. But in any case, I'm not going
to try to solve this now. We can later use other
tools or methods that can, that are specific to. Solving this, maybe by extending the mesh downwards
and then got it, trim it, and then reached
a level that you want. But most importantly, this is what we need to know
from kangaroos part. And then we can add
the thickness as well. So this after
smoothening the mesh, then we can add the
thickness again. Now, something I found to be
interesting as well here to, let's say, visualize
the results. And it is actually
the same thing that I actually used to
make the background. Here. This illustrative
background, which is with the colors and then with
these vector arrows. And so basically
here, what I did, adding this part that
gave me that result, I simply started
with the mesh first. The output of the
kangaroo result. Clean again. Well, actually I
don't think I need to clean this one because
it's already cleaned. So I will take this one there. So we first start by exploring the mesh and I'm transforming
it into surfaces. So extracting the
phase boundaries. And then I'm exploding all
of these boundaries and extracting the vertices out
of which I'm building now, it will new four-point surfaces. And then here I'm using
an evaluate surface of all of these
surfaces in order to extract their normal vectors. And then using the points, I'm using these
points to be like the hosting location
for these vectors. And then with the
height of these points. So these are the center
points of the surfaces. I'm deconstructing
their x, y, z values. And then since the
z is the height, I'm using the z, the heights of the points to be the amplitudes of
the vector display. When the point is higher, the effector is longer, bigger, when it's lower
than it's smaller. And then here, all of these
z values of the points, I'm finding their bounds,
minimum and maximum. And I'm inputting. Now I will turn this off. And we'll also turn
all of these off here. Yes. So basically I'm
using these bounds, the extremities of the z values. I'm telling grasshopper here with this green color component, please use the starting point
to be the upper limit here, and the endpoint to be
the lower limit here. All right, I could also
have done the opposite, but we can get flipped results. Now, let's say that
the starting point is here and then the
end point is there. And then all of these z
components are my parameters. And then I'm giving not these points,
not just parameters, but the surfaces themselves, colors based on the height of the points of
each single surface. Basically. This is what I'm, what's going on here. What is interesting
is that we can rerun it and then
see it playing. Like I said before, that I liked as a personal
preference to flip the colors. So to have the starting
here inverting the colors. But otherwise, we can also right-click on
this gradient color and then go to the presets and then choose another
preset altogether. And then you can say, you know, like the start screen,
the nth is red, which means that the
lowest point surfaces will be green and then
the highest will be red. And so this is more
descriptive diagram showing the heights. And then I get rerun it. And what is interesting
is when we click and hold the reset button and release and see this
relation progressing. Alright, so we have
seen how we can visualize these now just bringing this back
to where they were.
14. Thin Concrete Shell Heinz Isler Case Study Exercise : Now let's try
something different. And here, let's actually try
to do this as an exercise. Please have your files open and please try not to look
at this part here. I mean, this is the
solution of the exercise. But what I would like you
to try to do is this. I will now show you
the gold needed. First. I will reset this one. Okay? Reset this one as well. Okay? So what we want is if
you could now do this. So we already have
in your file now, you have this part. You have the mesh, you have
the anchor points, right? And now we need this
again for the exercise. So we need the anchor points, we need the edge lengths, we need the vertex
load obviously. But the difference now is that we have this
hole in the mesh. Alright? So how can
we reach this result? From this one? I run it from this
result to this. Let's say that, you know, our shell has something, they're under it anchoring down. Maybe it's a booth or something. Maybe also later we can
see if we can actually move this upwards and it
is in the z-direction. But for now, let's try please. Let's take 10 min, maybe. Let's take 10 min,
and then please try to replicate this example. And then after that, we're
going to come back and then take a look at what
would be the solution. Of course, there is
no one solution, but there are many
possible solutions. I'm going to show
you my solution. So please try not to
look at what I've done here before it
reached the solution. Try it on your own to do this, to reach this result and look for whatever
components that you might need to reach
this and see you in 10 min.
15. Thin Concrete Shell Heinz Isler Case Study Exercise Solution: Alright, so I hope that
you have found a way, an idea to reach this result. What I'm doing here is I'm taking these anchor points
exactly as they are. Just making this shortcut here. Putting it here as
the anchor points, I have the anchor
component here. And now the change, the main change is
applied to the mesh. And with that, we saw before actually with
the previous unit when we were making holes in the mesh of the
tensile membrane. And then we used some
curves actually. And so here I used
actually the same, this curve, only one
curve from this layer. I built this curve
in Rhino and this is called curves called mesh. And this is the curve
referenced here. What I've done here is exploited
first the mesh explode. Then I extracted all of these centroids of the mesh faces with the mesh
area component. So all of these are the points, the center points, and I use this component called
point and curves. This one, what it does is
that it will find for me the points that are inside
certain enclosed curves, polylines basically, or spines
and it can be just curves. And then I used a
cold phase component. We also used this one before. And with this one, we
can remove select faces. And so from this original
mesh, mesh kill one. I'm now calling only
these two mesh faces that have their centroids inside
of this closed curve. And then I'm using this output
mesh to be my new mesh. So now, instead of using
this previous mesh for all of these edge lengths
and vertex loads. Now I'm using this mesh with a whole new one for the edge lengths and
the vertex loads basically. Now, even if we do that, we still need another step. And this is because now if
I keep this as it is now, without adding any
other new step, and I tried to run it, we get this result. So it is like this one
but with a hole there. But actually what we saw is that we need the
hole to be anchored. Also. It's anchored there.
It means that we need to add more anchor points. Alright? So I hope that you also
have figured that out, that you also need
another anchor component. And also what we need to
now extract these points. We want to define these
new anchor points. And that's by these
colored faces. I'm using weaver birds
naked boundary component. This one. This will
give me the curves, all of the curves as the
naked boundaries of the mesh. And what I'm doing here, I'm just sorting out
with this sort list, the one that is the
smaller in area. So it is a parametric
method here. But of course this
may not be applicable to other examples where
let's say, I don't know. We may have, let's say, the same size of all of them and then you need to choose
one specifically. Then maybe you need to find another parametric way to
choose that specific curve. In this case, what I
know is that I have two curves and that I'm only interested with the one
that is the smaller curve. So I'm just choosing
the area component and then I'm sorting
this list of areas. And then I'm using a list item, I'm extracting the smaller one. So index zero, I know that. Now we have all this
sorted out from the smaller to larger
with the values out, not the keys out obviously. And then I have this
curve selected. And then after that,
I want now to explode this curve into
segments and vertices because I know that
this is coming from this previous mesh phase. And I know that this curve
has zero points there. These are the vertices. So these are now my exploded
curve with these points. And then these vertices now
are my new anchor points. So new anchors around
the whole opening. And then I'm using a
new anchor component. So basically now if
I click on this, I see this result while
seeing the result. While this has been converged, I can now link
this one there and attaches now to the bottom side to these new anchor points. Alright, so this is one
way to reach our goal. A further step that I
was thinking of, that Well, maybe there's been like a actual move upwards in the z-direction.
Maybe. I don't know. Maybe like under the shell
there is a small room, maybe a kiosk or a ticketing
booth or something. So if you consider that, then we simply need
to just use, well, the target input for the
anchor points, for these ones. And then move these
points upwards. In this case, the same points. I just use the Move
Component with the z. Then here, if I
click on this one, now I'm moving
these ones upwards. And now it's like zero value, so nothing has changed. But if I now try to
play with this slider, now I get this result. So you can imagine
that now there's, let's say Walls
under this opening. I don't know if for any reason. And then we can now play
with this geometry so fast, so quickly with
these components. And imagine that if we're
now doing this in an analog, analog way in the lab, we might have to
spend more hours to build this membrane
that we are working with. But now, with this digital
tool, it is super-fast. Now, what if someone
in the design team, while designing,
they decide maybe we want to move this whole
somewhere, somewhere else. Maybe. Maybe I want
to move this one. Let's say the back. Simply I can grab this curve, select it, and I can move it. Or I can move it to the side. Maybe my opening is there. And maybe it's also moved
upwards, maybe downwards. I don't know. Let's now change this to
negative 20 as my minimum. Instead of moving it upwards, I'm moving it downwards. It is very flexible to change. You see that it's only
now taking one phase out. Why? If I look at the original
mesh, you see that? Well, actually at these points, the points you see that we only have this point
inside of this curve, which is the center
point of this phase. This one. That's why this phase only this
one got called out. If we move this
one, they're, both. These ones will be called
that it's illogical behavior. You see now we have four, because this rectangle is now having all of these four points within its boundaries. Alright? So I'm going now to undo all of these movements here and here. So the same thing here. What we have done before is that we give it a thickness and also refined the form
with the thickness again. If that's what you would
like to reach as a result. Alright, so please, if you
have any questions about this, please email me your
questions with snapshots and files about any
specific components that we're not working with you, please let me know about them
and thank you very much for attending unit three and
see you at Unit four.
16. Planarization of Meshes and Polygons Part 1: Welcome to the unit for class, where we're going to
explore methods and binarization of
meshes and polygons. So for the unit four, we're going to look a
bit shortly about how we can do the polarization
with kangaroo is 0.099. It's a good way to
start trying to find ways of thinking of how we can actually find the
correct components that are, that are actually
used with kangaroo. And then later on,
we're going to see the same process but with small differences
with kangaroo two. So here we have the regular
polygons and polylines, then meshes polygons, but with circular and
spherical cap linearity. Now, the main focus of
this unit is going to be on linearization of hexagons. And that's because it is a
more challenging thing to do. Rather than plenty
rising quadrangles. Simple quadrangles is more
challenging and it's always, I mentioned topic in
parametric design. We can actually bring
arise hexagons, hexagonal patterns of a facade, like a glass or any surface, making the hexagonal
cells or panels flat. And of course, this
method can be applied to blend urbanization
of quadrangles, pentagons up their guns, and any types of polygons. Basically. What before going into that, I would like to first have
a quick look on hexagons. What are hexagons? And also have a bit of
knowledge of previous examples, previous projects that were
made with Blender hexagons. First, I would like
to say that a grid of exclusively regular
hexagons can only be flat, exactly like a honeycomb. That's what I'm saying. Regular hexagons mean that
all hexagons are regular. That they have the
same length of their sites and the
same internal angles. So what is a hexagon? Basically? And here are a few
sources for you. I will open them in the browser. So the first one is
about what is a hexagon? This one, this is the question. And it is a two-dimensional
shape that has six sides, six vertices, and six angles
from the name hexagon x. We can find them around us. I mean, here in nature like an honeycombs of bees or
like in soccer balls. And the types of hexagons are either regular hexagon like
this one or irregular ones. Now we're going to see that we cannot have regular
hexagons that are planar and at the same time
laid over a curved surface. So we need to know that
the interior angle of each corner of the hexagon
is going to be 120 degrees. That's basically the main idea. The same angle, 120 degrees, and then the sides are equal. And of course the total is
going to be 720 degrees. Alright? Now, the second
thing I want to show you is about the honeycomb
structure in nature, which is space efficient
and strong structure. And this has been known
since early age of humanity when we started to
observe things around us, then discover things and
how nature works, etc. What is interesting
about hexagons as a geometry in real life is that they maintain a bigger area possible with the smallest
perimeter possible. So let's say, let's say we had like a square
with a geometry, e.g. in opposition to a hexagon, it would need more perimeter or wall area to enclose
a smaller floor area. But the hexagon
has a better area. Efficiency ratio includes
a bigger floor area inside a smaller area. So hexokinase and
close more space using the same amount
for all material. Basically, as I said before, the pattern will be planar. And of course in nature
we could see sometimes like wasp comes or
even wild bees, honeycombs that have, that might have been
deformed or curved. But since they are not flat, these hexagons forming the
columns are not regular ones. Now, the third link, I think I missed
it, I will copy it. There. It's about the
geodesic polyhedron. So this type of geometry can actually
have flat x against y. The geometry itself
is not flat geometry. There is a spherical geometry. However, we must have, together with the hexagons. Their guns and other types
of geometries or polygons. So this is like a more
detailed explanation about different types
of polyhydramnios. So you see this is the
geometric reconstruction of a soccer ball with
hexagons and pentagons. Okay? The last two
sources, right, shows are about
precedent examples of pavilions that have
been actually made out. Well, they call them hexagons, but they're not
regular hexagons. The first one is this one. We can see here how the Mexicans are very
deformed and changed, not maintaining the
regular hexagon shape to reach the main shape. The pavilion. What is interesting is that
they mentioned in the article about kangaroo that thanks to the
use of kangaroo plug-in with Grasshopper
realized by Daniel Parker, who is the person who
actually developed kangaroo were septate
the constraint for the calculation of
the binarization of all the elements and
then the final shape. So they actually used Kangaroo to reach the final
shape of the pavilion. I think this is a snapshot
from the rhino viewport. This is a Nested
layout of all of the panels for CNC cutting. Alright. And then the
final example project I want to show you is about this other pavilion
where we see how the hexagon is hadn't
been deformed in a way to form this final shape
of the epithelium. And always keep in mind
that we can never have a curved surface of
regular hexagons. And so this is a quick
introduction about this unit and how we can replicate some of
what we have seen. First, we have here,
we'll close this one. So basically here, what I made in Rhino is I
modeled two curves. This one and this one. And I made it a surface
out of these two curves. So the first one is this
one that works as a rail, and this one is
the cross-section. Both of these with the sweep component will give
us the surface like this. And I intentionally made it curvy and not flat surface because we want to test how we can first make a
pattern of hexagonal shaped cells onto the surface and then tried to
flatten them out. So I'm using here a hexagon cell component
from lunchbox plug-in. Alright, with a certain
number doesn't really matter. The number, both in
u and v directions. And we noticed that
for the ones who already have experienced
with lunchbox, that all of these components, except for the hexagon cells, all of these will give
us the resultant panels, basically surfaces, except
for the hexagon cells. It doesn't give us surfaces
but only cells or polylines. Alright, now before diving into the definition and the solution, I would like first that we
can think together what would be needed in order to
make these hexagons flat? I mean, we saw before
with kangaroo that it can actually use Hooke's law as a base and make it
very arches and get to revolt or meshes
with the components. But what is interesting now
is how we can actually use the same Hooke's law engine to let kangaroo
plain rice geometry. If we look at this geometry and we tried to reflect on it, to polarize these cells, we would need maybe
I will type it here. So let's say, what do we need? Maybe we would like
first, this is on. So we would need to
flatten or plane arise. Let's type it. Flatten or playing arise. The gonadal cells. Maybe. Also, while the
binarization is happening, we would need to maintain
these corners, right? These corner points. We could also call them
the anchor points, as they are anchoring
the corners. So maintain the corners. Anchoring. We would also like to maintain maybe the length
of these hexagons, the cells, while the
polarization is happening. Of course, we're going
to have some compromise. We're going to say
we want to push the strength of
maintaining the corners. Where they are at a
really high value and also would like to
maintain the length of this, of these cells very strongly without having
some compromises. Because if we do that, the current shape stays as it is without any polarization. So we will need, we'll see maybe giving the polarization
force a bigger value and then
smaller values for the others just to maintain them in their place
more or less. So also maintain the hexagon Hexagon sides, insides. What do you think?
Any other points? Also, you could
try to think about maintaining maybe all of these like hexagons within
the original surface. I mean, maybe that while the
polarization is happening, these might drift away or to
the inside of this surface. So maybe also maintain
the original outer edges? Yeah. I think outer edges
of the main surface. I mean, not the outer
edges of each hexagon, but of the main
surface basically. Okay, so that's a starting idea. Or points, starting goals. Now, let's start
with the first one, flattened or playing arise
the hexagonal cells. As I said, I'm
starting with kangaroo 0.099, which is this one. If I go to forces, I will find here I can see to be the
realization components. The first one is this one flatten a quadrangle
quadrilateral, and the second one is
binarize any polygon. So if I bring this one first,
flatten a quadrilateral. So it only needs four bytes. Now we have existence,
we have six points. So I don't think this would
actually work for us, but good to know that
this exists there. Let's go back to here forces and then go
back to this one. So plain arise any polygon,
it needs vertices. Okay, So it's interesting. Now what's giving
us more flexibility to print arise any polygon. In this case, we
have hexokinase. That's the first
one, maintaining the corners of each hexagon. Let's see what we can
use for this purpose. Maybe we could try
to use either anchor spring or actually when we use this kangaroo
physics simulator, we could also use the
anchor points input. Maybe. If we tried to use that one, we can check the chicken at that route and see what happens. So this is for
anchoring the points. Now I would also like to think about maintaining
the hexagon sites. The sides means, in other words, these segments, these lines. And we already know
that there's this interesting springs
from line component that will actually
do this thing. So we can use this
one for these lines. And then the final
one maintaining the original outer edges
of the main surface. It could either be anchoring these points like these ones. These points there that
are not the centroids, but these are the
ones on this curve. And I think one
interesting component could be a curve pole. So if we want to pull these
points onto this curve, then this curve on
this side and etc. So these are our starting steps. Maybe they all work, maybe not, maybe most of them work
or some of them work. Let's check them out. I'm going to just move these
ones downwards to make this, make things a little less dense. Okay? So this is our starting point. Now, let's start
with the component. First. What I have done here from this hexagon
cells component, the output of it are
here, the hexagon cells. And so this means that
if I use a list item, this one, they're just
check out the results. So here I have all of these
hexagons, each one alone. Okay, that's the list
of the existence. Now, in order to tackle
the first point, print arising the hexagon cells. We know here from
this component, from this one, it
needs vertices, right? So from here, we need to
extract the vertices, the points of this
hexagonal cells. And that we can do this is explored component coming from curves, utilities then explode. So we are exploring all of these polylines into
separate segments, individual segments
and vertices, right? So you would imagine that the
output of these segments, we can see this list of
all of these segments. It's a tree of lines, separate segments, not
joined as polylines. Here we have five, I think one of the edge, these F6, so an index of five. So there are six sides
of the hexagons. However, now, what do
we need to use as well? Get the vertices right? So these are the vertices. The vertices I just separated. This one, put them there. So now we're doing this
discretization step. So we're just transforming our initial pattern into
elements that we know. We can apply to them. The forces from kangaroo. So these are the vertices. I can now simply plug them into this input of the plenary
rights component. And here I have the
strength input. And one thing that you
would think of is that, shall we like, remove
the duplicates of these? Because what we know is
that this is a cell, this is a cell, and
this is a cell. So at this point here, this one, actually here
we have three points. We have the point
coming from this cell, from this, from this cell. You see here, there
are three points. I think since we're playing
rising each cell we want to have in the
end planar cells, we should not remove
the duplicates. We would need to maintain the duplicates because we need to maintain the binarization
of every single cell alone. So for this, we have
to memorize all of these vertices and for this
cell of these vertices alone. So that's why we
need to maintain them and not remove
the duplicates. Now we could try to remove duplicates and then
check the results out. I'm going to do that soon. But first, this is the
linearized components. We said that we need to maintain the corners, the anchors. So here with this method one. So first I will now enable this. And this is set to true. So it says that now
it's not running, it's not being stimulated. It's like reset it. And my goal is that the output I'm using here
first, the method one, it's called particles
focus to where I'm using these vertices themselves to be actually the geometry
to be transformed. And then the output of that. These points after being plagiarized and everything
is going on here. Inside of this
kangaroo simulator. The output of that, I will
just make polylines out of these and then use a boundary surface
component to flatten them, to make flat surfaces
out of them. And this component
to give them color. This is the strategy
that I wanted to follow. Now, if I try to
use these points as anchor points like this, okay, that's one
thing I'm using. So what do we still have
maintained the hexagon sides, so the springs from line. And so for, from these
segments output here. Remember when we
saw the segments, how they are being
organized and data trees. And I said then that when we saw the
points that are here, that we have here, these three
points and not one point. Here, we have now two segments. Not one segment, because this is a segment of this hexagon. And this hexagon, this is segment of this
exocrine and this exit. In this case, though, I think it would be better
to remove the duplicates because we just want to
simply maintain these lines. That's it. We don't want to I mean, we're not really saying
that we want to maintain the original hexagons rather
than just maintaining these, well, their lines where
they are in space only. That's it. That's why here I'm using remove duplicate lines
from kangaroo itself. Utility. This one here. I'm first flattening. And the input here,
all of these. So the input here I have. 101 and what thymidine
one segments and the output will be 594 segments. And then here I have the
springs from line component. I will also talk about this, the stiffness and
then the length of this strength in a bit. Now I think we're done
with at least these ones. I'm going to see later if we need to use this pole or not. The fourth point, let's first see if actually we
would need that or not. So let's now see here. Let's check. Our strength value here of the plenary rise
is set to zero. Now I'm going to launch this. I'm going to actually click on this and check the results. Okay, nothing happens. Let's check if we increase
the strength value here. Would it work? Okay, Still nothing. Maybe I need to
click on this one. Still nothing. Okay? So this is what I want to
actually say that even if it seems that all the
connections are good without apparent issues, what's preventing things from working or the anchor points? And so this is why I have this important
observations note. So trying to use the
vertices as anchors, as anchors would block
the IP simulation. And if, even if we
try to use now, the anchor is like
this component. We saw the anchor spring. Also. It may not work for this
connect to this input. Okay, I reset the receipt, how it started to simulate. Let's try now to use this
anchor spring component. That's what we have
actually laid out there. So if I also do
that and launch it, we get an error. Although it's simulating. What we can see the error. It says data conversion failed from anchor
spring to point. Although it's still working,
which is interesting. The thing is that
even if we use it, even if we tried
to play with this, it doesn't really
change anything. There is no effect
on this simulation, which is itself
while working fine. But actually this is not
what I have to do here. I actually have to link
this one, not here, but actually with the emerge, with this one as a
force. But not there. Because if it doesn't,
it doesn't do anything there the input
needs actually points. Also something to
consider that when we want to input anchor points, it is not the
anchors from spring, but rather this will
actually go the merge. This only takes zero points. That's why actually
it worked before, because it did not
really understand that it gave us an error, but it still worked. The simulation was working,
which is interesting. It kind of ignored, even if I was, it was an error. This is one of these
subtle things that sometimes if you make a mistake while
working with kangaroo, it launches the simulation
without stopping it. But then the bad inputs, all input is not
really doing anything. It's not affecting
the simulation. So I now disconnect this one. I'm going now to actually
add this to the merge. Let's see what happens.
Alright, so as well, it doesn't do anything. It kind of like blocks
the simulation. So if we add the vertices in the anchors input,
it will block it. If we also actually
use the springs, the anchor spring, it
will also block it. So keep that in mind
that in this case, the strategy doesn't work. So this is to keep in mind when I bring
this back to true. And now I will
launch this without these only plenty rising
these springs from line. And the geometry of the points, the geometry to be transformed. It now works. And so basically
as I said before, that the output of
the points are being converted into polylines and
then the boundary surfaces. And then we're giving
here a blue color. Now, if we increase
the stiffness, let's say to ten, it
kind of goes back. And then tries again
to plane arise. But slower and not
sure if it will actually reach a final
converged result. With all of the panels
being penalized, with this value being at
ten or not, or at 100. It looks like it's working. You see that now in
order for this to work, It's kind of pushing outside of the main surface,
the original surface. If I now also turn on
this surface Preview on, we see this red one is
the erosional surface. And then these blue panels are actually the ones
being binarized. And you see that it's
really dragging away. Now all of them are flattened. But there are now really far away from the original surface. Now, maybe we would like
to have this as a result. Maybe that could be fine and that we are
done with this now. However, if we
needed to maintain these original edges of
the original surface, then as I said here, we would need to try
this curve pole. However, before trying it, I just wanted to show you here that if we remove
the duplicates, if we call duplicates, so instead of the points, you're not being called, as I said, then
what would happen? So that's also what I
wanted to show you here. These are all of the vertices. This is a data tree. And then here we can see
the organization of all of these vertices of the hexagons. And then after calling, then we have individual points, but without any
duplicates, basically. So if we try to remove the duplicate points and we only get the points
without any duplicates. What would happen? Lunch?
We get this result. The pattern breaks away. So that's why it makes
more sense in this case to maintain these,
maintained these points. So maintaining the same
data tree structure and not calling duplicates because we need each one of these corner points for
every single hexagon cell. So that's why it doesn't
really work here. To call it replicates. And for this one,
for these ones, if I now reset it
for the segments, I said that we can actually remove duplicates
because here it doesn't give more benefit of maintaining every single one. Let's try to do that. Here. I'm removing the
duplicates. It works. If I don't. Also make sure to adjust
the rest length input. Let's try now. It's also working. So in this case,
with the segments, both methods work either using all of these segments of every single lexicon or
removing all duplicates. However, I would
rather prefer to use the Remove Duplicates as we have a less number of
elements to be simulated, to be calculated for, it's always better than
to have more elements. Especially that if we have
a big geometry and lots of elements or a huge project and then you are running
the simulation. So we might then face problems if we don't call it
duplicates in this case. Okay, now I'm going
to reset this one. We said that because
we gave a high value for this stiffness of
the springs that we saw, that it was kind of drifting away outside of the
original surface. Now what if we use this
curve pool component? And so for this one, we need first to separate all of the outer edges of the
original edges of the surface. So this one, this one, this one, and this one. And then we also need to
separate all of the points. Then we will need to find out only the points that are
actually on these curves. And so for, for
this surface here, first I'm doing a deconstruct, deconstruct, be wrapped,
extract all of the edges. Either they graphed three here. So putting each one of these
curves into its own branch, I'm flattening the points, all of the vertices, putting
them all in one list. And then I'm calling duplicates. So from this 1,316 points, now I'm left with 400
points without duplicates. So what I need now is to, I would like to find the curve
closest point from this. It will give me distances. And then from these distances, I will just need to
take the ones that have the distance equal
to zero basically. And so these are the curves. These are the points. And first, I tried the quality component
coming from math equality. And I can see here the distance
from the distance here. Alright, here we
have four branches. And you see here
like we have 00. If I sort these, because I want to sort the distances to be
from the smallest to the largest and to check if
I have all of these zeros, all of these represents the points that are
actually on these curves. All of these points. So this point, this point,
this point, etcetera. But what was actually
interesting and kind of weird when I did that, I did not get the logical result of getting the trues and falses, the output of the quality
to be as I was expected. And so here I got instead
of a true, true, true, like matching the zeros, I got only true and
false, false, false. And then for the second branch, for the second side, the same thing basically through their than false and then we did not really
work as expected. And actually if I use
this one, equality. And now after finding
distances to be equal to zero and then finding
the quality Boolean. This true, false boolean result. Using a colored pattern. With these points. I only get these points. Instead of what I was
supposed to actually get. All of these like this one, this one, this one, etcetera. And that's why I thought maybe
if I use a smaller than, instead of like the quality, by, then I use a really
small number, like 0001, knowing
that the smallest one, after sorting the list, it's around 0.74, 90.001
is a good precision. And when I do that, and now I get a points. Okay? So actually here, I have now 70 points
matching with this. If I actually did
a flattened before just to match this one
with this layer structure. If I do the flattened here
and usually sort output. If I do this. So we see here it's giving
me the first until index nine x nine and then
false, false, false. Which is actually weird
because this item zero equal to zero at index
ten is giving a false result. And this should have been
actually true and not false. And I think here the reason
is that it's really, really small number
like zero.00 something. And then a number like
one or two or something. It's actually being grounded
inside of the panel here. But Grasshopper is not
recognizing it as being grounded since it's not really
absolutely equal to zero. That's why we're
getting a false result here. That's the reason why. So after sorting them, I'm using this sort, so the keys, but then I'm also just bring these back here. Okay? So I did these
smaller than 0001. And then now I get, so after
doing that, actually here. And this one again, you see now it's matching. So 70, 71st is now false. At 71st, null is false, and now it makes sense. Okay? So we'll bring this back there to maintain
the 3D structure. And now I'm pulling, let's see these points. Because I maintain
the tree structure. When I grafted this
list of these curves. This means that I would like to pull all of
these points to this. This curve and then all of
these points to this curve, all of these points
to this curve, and all of these
points to this curve. That's the main idea. And now I'm using the inputs. So the curves, the grafted curves as the input
of the curves, the points into the points. And if I actually see this
list without flattening. So this list is maintaining the structure for the points according
to the curves. Okay? And now I have this
curve pool component. I will maybe move
this down a bit and then I will connect
this one with emerge. Here. I'll actually
turn this off. Only seeing these. So since I added
a new component, a new force to pull these points towards
the outer edges here. You see that now it's much
slower as the simulation. Before. If I disconnect this to remind
ourselves how fast was. It's much faster to simulate and plane arise the hexagons. And when I connect now, the this curve ball component, it's a bit slower. And it will take more time
to finalize the simulation. This they're better. And so here we just
need to make things, let's say stronger or faster. Simply because this value, it's making this
binarization component going stronger and then move and
then also more powerful. Now be careful, here, I added this note, values above 1,600 would
break the simulation. So if now I increase
it to 1,600 broke, you see, it does
this weird result. So if I bring this back and you see that now deformed a lot, these hexagonal cells there, although you see that now
the edges are maintained. So this is the compromise that I was talking about is that we would need to
compromise a bit on, let's say the length of the
lines or this side here. In order to achieve a
plane arise the result. If I increase, let's say
this one a bit more, it will go back and then
take more time to simulate. If, let's say I discovered
that it's pushing outwards, then I would need to increase
this value in order to give it a more powerful strength. And also of course, if we wait more and maybe
decrease this value, then it would finish
the simulation sooner. But I won't wait for it now. I'm going to stop
the simulation. And I have also another method called method2, lines focused. So one would ask, okay, we used what we use these points as the
geometry is to transform. We could actually also have used the segments as a
geometry to transform. Both approaches actually work. If I enable this. And if I turn this on. And this is actually the same, the same components,
basically, the same inputs. But the only difference
that this geometry input, we have the segments. And since we have the
segments in the output, I'm simply joining the curves. And then making
boundary surface. Instead of, you know, they're making polylines
boundary surface, I'm joining them because
these were separate segments. Now if I click on
this, Simulate there. And what we can do now, since I'm giving two
different colors, I can now try to separate both simulators and then try
to see what would happen. Enable these ones. Okay, run both. Do you see the small difference that there is a
difference between both? And also like some
plain rice cells in one are not paying
arised in the other one. Although the inputs
are the same, except only for the
geometry input. Which is actually different. Like, you know,
points or segments. Well, it is interesting to know. Do you see that even though
the same components, the very same forces, except for the geometry input, will get slightly
different results. Check this side. Okay? Yeah, Well, these are
still not been arised. What about this
side? A bit slow. And you see here like it's
kind of like a line that has been formed over there. And the middle. Alright, I'm going to now
stop these two simulators. I think this is mainly
how we can simulate the generalization of
polygons with kangaroo. One. Of course, depending
on your project, on the simulation, what's
the geometry made out of? You might need to also use
maybe other components. Like maybe anchoring the
points in a different way or having a different anchoring
situation, et cetera. So it actually depends
mainly on the geometry. But for now I think it's
interesting to try to bring arise hexagons
on this curvy surface. I'm going to disable this. And then let's check out how we can actually apply
the same thing now. But with kangaroo
two components.
17. Planarization of Meshes and Polygons Part 2: And I will now enable these. I've actually is able to most of the components and I've enabled only the
ones I'm working on. Because actually if all
of these were enabled, then even if the simulators
are not running, then that will cause the
file to be really slow. So with kangaroo two components, the main process is the
same, almost the same. Most components that you
are using are similar, but some are different, and we need to be aware of that. So I will not talk
about this one first, but about this one. Remember when we said that the first step
for kangaroo one, we need to find a
plane polarized or a flattened component to
plagiarize the hexagon cells. And then we found out
that this plane arise. Any polygon components
will do the job. However, in kangaroo too, if we go to goals mesh, we only have this one
about binarization. Not two components, only one. And if we bring this one, it's about only
branded rising a mesh, but without having
the possibility to actually input points. So that's the first difference. So here instead of doing that, there is a similar component that's called Gold co-planar. And this will actually
play the rise points. So any polygon, basically, it doesn't specify
any specific thing or geometry in particular, but only with the
description co-planar. It doesn't have more details. But this does the
same effect like the previous kangaroo
one plane arise. Any polygon. Here? It also has the endpoint, the points as inputs
and the strength. This is the first
difference and I have it here, this co-planar. The second difference is that as now we also know
that it springs from line component from kangaroo
one is now the same as from goals line,
the length line. So we're using this one for the lines for the segments
of the hexagon cells. One of the big
differences is that we're actually now
anchoring the points. We're using this
anchor force to keep the points of the
hexagon cells as much as possible on there or in the original place
without causing them to drift away from their
original locations. This is now possible
even though we use this one as one of the forces are goals
with kangaroo two, it will not block the simulation as we saw with kangaroo one, that when we use the points as anchor points or when we
use this accurate spring, then it would block
the simulation. And this one, the curve is actually the same
as the curve pole. Remember when we use this curve ball also
has the same icon. Actually it can go to. And I believe it's let me check. Yeah, coming from here, goes on. And we have three
components on curve, on Mesh and on plane. So these actually deal
with geometries to keep them on either curve
or the mesh or a plane. And this one is on curve. So on curve for kangaroo
too does the same thing. Actually. It has the points
curve and strength. So we saw that we
have the co-planar for planar rise,
the length line, like the springs
from line now is the new one anchor
on curve the same, the second one, which
is new, is this show. We saw previously that the show would
actually interesting about it is that it will include certain geometry that we choose. For instance, I'm using now the hexagon cells to
include them in the output. If I don't do that, then we will only have
the outputs here, the points and the lines
coming from the line length. But without these as hexagon cells that have
not been yet exploded. And this actually replaces the previous input
with kangaroo one. The geometry input
where we have to choose the geometry
to be transformed. It is the vertices
or the segments, et cetera. In the new one. Simple, we can simply
use the show components, then connect the
geometry that we want to maintain as
part of the outputs. Also, let me now bring. This there. And I will actually
now snap pool. Second. Yeah, make it a bit
bigger. Alright. Let's check. Okay. This is on basically
the same steps. The same start is the same starting point with the sweep one and the surface
and the hexagon cells. This is the same until here, and also exploring the hexagon
cells with these points. Also one of the same things is that we have the co-planar. So this one is the same one. However, one of the differences
is that we want to show you that even when you
go more and 1600s, as we solve the previous
definition, it will not break. It will go up real
high values without actually breaking the length for the springs from
line while removing all of the duplicate lines
of the hexagonal grid. So we're doing the same
thing actually like previously for the anchors. We're also removing all
the duplicates points of the original surface. And these will actually
work as anchor points. And here, since the
data structure is a tree including every
single hexagonal cell, I would actually need first
to flatten all of that, all of all of this, and then use this. So the input here is flattened. And then I'm using this to
remove duplicate points from angry to utilities from here. And then from 1,316 points, I'm left out with
400 points. Here. I'm using these points as anchor points coming from
kangaroo two goals point. And also I'm using the same thing with the
discretization of the curve. The surface edges of, well, these surface edges with
the points that are only on the edge or the edges of
the surface and then using the curve or previously
the curve pull component. But order to maintain these points always
on these curves. Alright. I'm going to zoom
out a bit here. Now, basically,
what I want is from the output to get these hexagon cells that
have been playing the rised. After doing all of that work. And then do the same
afterwards with this boundary surface
to make surfaces out of them after being flattened and also
give them a color. I'm going to turn
this geometry on. What else may be
also these curves. I will see if there's
anything else here. We'll also, well,
let's take care. Okay. That's yeah, maybe these ones. Let's check this
one as well. Okay. That's why coming
from here somewhere. Alright, If I now
run it without this, let's look what happens. Well, the thing here is
that I cannot, well, I cannot actually use these to flatten them with the
boundary surface. They are all in one branch. This list here, simulation
is, it's actually working. I can check these values here. Tried to change and
see what happens. Let's check the strength here. This one. But I cannot extract every
single hexagon cell alone. And not all of these
segments that are scattered all in one whole list. And as you can see here, that the output of this is only lines or null
or empty fields. When I use this show
components coming from the curves here. The closed polylines. Then here I have,
among the results, I have these polylines
for learning curves. And so how can I
now extract these, put them on this side. As I know that these are
actually closed curves. And so what I can
do is I can first flatten the output
and then I can use this closed curve component that tests for closed curves coming from curve
analysis closed. And it will give me a Boolean
result of true and false. And then I will use this
result to this patch, this list of all of the elements and then only get
the closed curves. And then now in this list, I will have the 195
borderline curves. And then I can make
surfaces out of them. And then I can also see the geometry with
this color component. So with Kangaroo
to why simulating, I'm here using the
normal solver. Now, it's converged with having only these
values as inputs. Okay? If I now change them, now it's making
the flat surfaces. I'm trying here to
kind of force flatten. Just a friend threatened
everything as much as possible. Now, all the hexagons
are plagiarized. And you see that it's
like kind of like forced the flattening where some panels sides
became like straighten, straightened in order
to reach the result. Now here we have to know
where we gave high values, where we gave lower values. And so what forces are
dominating the simulation? Because that would greatly
affect the final result. If I now increase this value, you see that now one of the
panels is not any more flat. So if I have to then increase this one more to force
the binarization. One other factor would
be the anchor points. If I increase their
strength too much. So it's trying to pull the corners back to
the original edges. And so the
polymerization has been now overpowered by the anchors. I need now to bump this even more to force it
back to plain rise, to overcome the force
of the anchoring in order to reach a full
parameterization. All planar results. The final result is a
combination of all of the strength values given to
the various forces involved. Let's try to make this smaller. And then we zoom in
on the hexagons. You see how the shapes
of the hexagons change. When this value is zero. It's like not giving any
anchor force to the points. If I increase the strength, you see that it's
as if the hexagons are moved back to their
original locations. Zero no force. A higher value, pushing them
into their original place. And actually even if, let's say, if I turn this preview on, we can see the original pattern. So no anchoring, zero
binarization without anchoring. But it will actually move
them around the bit, move the points around it to
make repolarization working. When I increase this, it will bring them back to where
they were originally. And then I have to also
bump this higher as we saw, push them back to reach
a flattened result. Even with 50,000 year still not reaching
the A-Flat result. That's why I would
hear have to tweak. Maybe they're a bit less. Maybe you're a bit less. You see to reach
a working result. And as we saw before as well, the arm curve component. Now you see here this at zero, it's not given any force. If I start now to check
it out and then try to increase the value, you see, it's now trying to move to the original edges. You see. So it becomes like a game
with different parameters. And then we have
to choose where we would like to compromise. Because you see here, when like, you know, this one
is at zero, e.g. if I rerun this, I was getting all of these. Maybe this one and this one is like straight line and maybe
I don't really like that. I will turn this preview off. You see it looks to
me a bit far from the regular hexagonal pattern. These ones, if I
increase this EBIT, if I increase these a bit, maybe the length of these
wall of the cells here. I will rerun it and
see what happens. It's still maintaining
these two lines. And this was 50. By the way. If I make this less rerun it, you see, because I will run it, it changes the result. If I now start with, let's say 40,000 and rerun, we get a different one. You see, that's why we
have to be careful about this to be aware of what
we get as a result. I personally like
the previous result that's coming from kangaroo one. It was not, Let's say, too strong on life changing the shape of
the whole pattern. However, Kangaroo to kind of provides these more
functionalities. And in a way, we can actually force binarization
to a certain point. Like we can hear, rich, like 50,000 and
even higher values without having to break. But the kangaroo one, we saw that anywhere above 1,600 newtons for
the binarization, it will just break. So we have to weigh our
priorities where we'd like to compromise on the
geometry so that we would reach a final
satisfying result. This is one of the
reasons why I'm comparing between kangaroo 1.2
are working good. One is older than two. It might have at some
points, it might give us, let's say for certain
situations, certain geometries. I wouldn't say better results, but different results
that may suit us better depending on what
you want to achieve. And what is our main
goal basically. Alright, so we'll bump this, maybe back down and
also this down. And what else do we have? Let's see. I'll just stop. This. Will actually make
this a bit less. And this one as well, a bit less re-run. Let's see if it would
play enterprise. All of them will just
like maybe brink. Let's just wait a bit and see. Maybe bring this back
down a bit more. Also. Maybe this one down. Yeah. Okay. Well, still leads to
just slightly down. Let's see what happens. Okay? I will just pause this. And I can now use this result. Okay? And then now I would like to do, is I would like to visualize this result in comparison
with the original surface. So I will turn these preview, these ones preview off. And these ones. And okay, So basically here, what I'm doing is
I want to actually see the deviation of the panels, of the newly polarized panels. Their deviation from
the original surface, how far they are deviated. So e.g. I'm doing a
certain projects, either it's for me personally that I would like to
know out of curiosity. I would like to see how the simulation
affected the panels, deviating them from
the original surface. Or I would like to present it maybe to a client or to
the team that I'm working with or to consultants I'm working with as
well. It depends. So showing first the
original surface and then the parameterization
process again grew. Showing you the simulation
reaching to this result. And here I'm doing it, but with two methods. Either I'm extracting the
center points of the panels, will move this here. So the centroids of the area component with every component and
so it goes like this. Also, drag this a bit. There. I'm getting
the center points, I'm finding the
surface closest point. We can find this component
from the surface sub tab. Licking the original surface
here from their connection. Here is hidden so that we
don't mess with the layout. And then simply
extracting distances, we get the distances that
are coming out from here. And then I find the bounds, which will give us the
maximum and minimum values. And then deconstructing
this domain, minimum and maximum and
to separate numbers. And then simply,
I'm getting here now this gradient component, I'm feeding it here with the lower limit for the smallest number of
deviation and the maximum, the highest number here. And then all of the distances
into the parameters. And then here I'm using this
custom preview and then this gradient output will be linked with the material
output input here. And then I'm using the surfaces as inputs here for the geometry. And then I will make
this preview on. And then now I turn this off. And then now I can see this graphical representation of the deviations of the panels. I can, of course play
with the gradient. Now it looks like
for all of those, all of the ones that have
a lighter pink color have the smallest deviation, which means closest to
the original surface. And the ones that
are more reddish are actually further from
the original surface. That's what this
means. Basically. Now one might say that they
are actually hexagons. And so the point of
one hexagon, e.g. the distance of the centroid to the original surface
could be something. However, the distance of the corner points could
be something else. So maybe we could try
also to find out how far each corner point is far away from the
original surface. So this is the second method of visualizing the
deviation of the petals, the vertices from
original surface. Instead of only the distances
or the panels themselves, only taking their centroids. And that's by simply
extracting the vertex by exploding the polylines
that we got from here. Get the vertices
here and then here, I'm removing duplicates
of the points because I need for this purpose, for this point, only
one and not the three points coming from the
adjacent takes excellence. Having done that, I can use this surface closest
point as well. With these points being as
the input surfaces the same, finding the bounds
deconstructing domain. And then now here I'm
using another gradient. And I will turn this on, turn this off, and
then turn this off. And then we can get
this nice result which shows the deviation
of the vertices. I can also turn this
on to see the cells. And for individual points, we can see now visually how close and how far they are
from the original surface. The greenest being the closest, at the reddest,
being the farthest. Something that well, you might ask yourself would
be about the points. Instead of having
points with small x's. Can we have small
circles or spheres? That's possible. We can do spheres. We can simply get
this fear component. And we can do, well next, get the points as the base
points for these fears. You see now because
I'm using the spheres, it becomes a bit slower
because now it's calculating for every
single spheres location. But although it's low, it's possible to work with. However, when you want
to run this simulation, it will become extremely slow. Calculating for every
single sphere location, center point, and then building it and then
visualizing it. And then for every
iteration is doing the same for 400 spheres. That's why it becomes extremely slow and might freeze
the simulation. So be careful about that. By default, radius is one. I will change it to zero to two. Let's check this out. Okay? And then now I can
use these fears as the geometry color to color, preview off this one. And now we can see the
visualization of these spheres, basically with colored spheres. Let's try to make this 03
maybe takes a bit to load. Okay? So these are the spheres, but I will remove them,
bringing this back here. However, this is for you to know that you can also use
spheres instead of points. Alright? I think that's it for this part, the binarization of
polygons and polylines. I'm going to make sure
that this has stopped. I will go to disable these ones.
18. Planarization of Meshes and Polygons Part 3: And now let's look
at how we can plane arise meshes instead
of polylines. So in case we already have, let's say, a pattern
of meshes or surfaces. But now we will try to, well with meshes and see how we can play
around with them. There are a few differences. So let's check this out. I would make sure that this
is on and will enable these. Will also enable these. Alright? So basically what I'm,
what I've done is that I use the same procedure
to model the surface. This one with the two curves, making sweep and surface. And then instead of
making hexagonal cells, I just made simple quad panels. So this is the start of, of it. And then here I'm converting the quad panels and two meshes. First step is converting
your app to a mesh. And then here's the
really important. You see that we have here
now separate meshes. I have to join them
and weld them. So basically I'm using the weaver bird joined
meshes and weld. The two steps of
joining in welding can be done with one-component,
which is found here. This one. Or as you saw previously,
previous examples, we can actually also
use two components, joined N world, native
and grasshopper. In the case when using this one just makes
sure that the weld here is set to true because usually it's by
default it's false. And so from here,
hundreds of meshes. From this output here
is only one mesh with 121 vertices and 100 faces. So all of these are
now one joint mesh. Now, most of these steps involve similar or same
components that are used with the
kangaroo simulator. And let's check them out. The first one is
the plenary rise. And for this one, instead of using
the previous one, we co-planar, which uses
points as inputs here. And the new one I'm
using the plane arise. So it's a similar component
to plagiarize meshes. And you see this m
input for meshes. And it's coming from kangaroo
two goals mesh plane arise. And this also similar to
the kangaroo one component. You will need to start
with zero first, I'm bringing this back to zero. So this is step one,
polarization of meshes. Step to strengthening
the edges and so forth. This is from the mesh output. Here I'm actually extracting the fixed boundaries and
exploring these segments. And here what I
could do is I could either give this
directly as input, the equal length component. And here I'm not using
the line length, so I'm not using this line
length length lab component but equal length component. I could either do this or
I could also hear remove, duplicate lines because I
know that since this is a mesh and this is
another one here, that the adjacent segment
is now a duplicate lines. So I can now, instead of having
400, I can use this one. I need to flatten the input to have all of the new segments, these segments in one
list and then the output, now I have 220. So that's also a better,
more efficient way. And also add this
one to the group. So strengthening the
second step that we saw, a strengthening the
edges of the meshes. Also bring this to zero. Third step is strengthening
the diagonals. And in this case, I'm
extracting the fixed boundaries and then I'm exploding again
the same step be there. But instead of getting the
segments, I'm using here, the vertices and
I'm just drawing the diagonals inside the faces. So I'm doing this and that. So basically I'm enforcing or strengthening these
distances within each phase. And we have seen this
before actually, when we were simulating
Hooke's law within it. Remember that with
the contrary mesh? But then we said that what if we had a paper or a rubbery
material instead of in it? So we need to actually maintain
the material continuity. Basically also the spring. Let's bring this also to zero. And then the fourth step is
strengthening the particles. And here we have two
ways with the particles. These points, basically the corner points of
each mesh phase. I could either use
a deconstruct mesh, which comes with the mesh edit plug-in under Mesh Analysis. And the output. Are the points. Or I could use this naked vertices component
from kangaroo. Alright? And what is interesting
about this is that I have here multiple
output options. I could either use
the naked points. But you see that I'm only here getting the
external points. And these points are
the internal points. I need to make sure
that these are now given the input here
for the points. So here we have 121 points, or from here, the same
points basically. And also to bring
this back to zero. By the way, this component is actually coming
from kangaroo one. It's actually working normally, doing the job of getting
the naked vertices. This is something to
know also that you can use components from
kangaroo on if needed. However, this is also
present in Kangaroo to, it's basically the same
one coming from Kangaroo to mesh naked vertices. But let's just use this one to stay consistent with
the components, although it may not
make any difference. Link this one there. Then preview off of this one. And the sort of the group. Alright. And what else? And
for these points, I'm using the anchor component to anchor them in
their own place. In other words, I'm
having here a series of compromises between the
position of the points, the length of the edges
of the mesh faces, the diagonals, the binarization in order to reach
a working result. Basically. And then step five, the last one in this case is
to maintain the outer edges. This is similar to the
previous step that we used. Here. With the exergonic simulation. I'm doing a deconstruct B-Raf
of the original surface. And then I'm getting
or grafting to get each edge in a
separate branch. And here I'm also extracting the vertices called
duplicates, etc. Doing the same thing basically. Then extracting these
with the smaller than 0.001 as we saw before. And then we got here
the outer points. And we'll also
bring this to zero. And I also use this
on curve component, which we saw previously. Alright, so we will
first start with that. And later on we're
going to also try this experimental step
with this mood component. Alright, so we have all
of these steps together. So a quick wrap-up,
binarization. Step one, step two, equal length of the
edges of the mesh faces. Step three, strengthening
the diagonals. Step for the anchor points, the corners of each phase. And step five, maintaining
the outer points. Okay? These are all now at zero. I will turn this on. Or actually what I will do, I will enable these
and this one. And this one, basically
the output of that. So what we're doing is
to have the output here. I'm extracting the mesh, cleaning the tree to get
only the mesh geometry. I'm extracting the
phase boundaries and then I'm making flat
surfaces out of these. And this is the preview
of the surfaces. Alright, I will reset and
quickly check the other parts. Okay, turn this off. So now we can see the phase
boundaries, the lines, and then when we have
the flat surfaces, they will appear in pink. Alright, so now let's run it. You see when we start like this, we get this result. This is because we have no force at all from any
components being applied. So we can start by e.g. strengthening the lens slowly. You see there's a
weird behavior. Maybe if I start giving
the anchors some force. So you see what happens. If I decrease the force? We get it again. We get this effect again as
if they got scaled out of it. With this, well, I mean,
interesting effect. But when I increase this
slider for the anchors. Now you see that
it's maintaining the points where they should be. So that's my expectation
with this component to maintain these points where
they are as much as possible. Actually, I want to
explain why I'm using this two input values with the combination
of the power of ten. What is interesting
about this is that it will give us quickly
high numbers, high values when
we use this one, instead of using the
normal number slider. And even if we
increase the range, it won't be as intuitive
with our examples. So even if I have, let's say zero to 15, but then ten to power
zero is 1.10 to power 15 is really big value. This is why I'm using
this method here. Like a turbo slider kind of. Alright, so we
strengthened the anchors. And let's keep this not a
high-value, not too much. Hi, I want to strengthen
the diagonals here, starting also to
get some panels. But when I increase this, for some reason, it does, this effect will not
increase this too much. We'll keep it now. There will also increase now
the linearization. You see when I do that, we're actually
getting 9,000. Okay? So it flattened everything. So now this is one of the
working results, let's say. But what is now
compromised is that it is not really maintaining
the original edges. If I now turn the face boundaries of
the original surface, you see that looks like this, and now it's a bit too far here. I will go to step five,
maintaining outer edges. And let's try to
increase this one. You see that now it's
bringing them back to the original outer edges
of the original surface. You can see that when I do that, it gets closer to the original, original ones. You see. But when I have let's see, you know, like less flat panels. Let's see what we can do if we go back here and
try to increase this. Okay? So you see that now it's playing arise
the remaining ones. So now we have flat
panels and it's making, maintaining more or
less the outer edges. Let's try to go back down. The thing is that when
we play with this, you see that it's now getting
closer to the outer edge. Could be that certain situation, other situations we
have a certain frame, like an outer frame
or maybe it's part of a building
facade with millions. And then we have different
compromises that we want to consider to make
everything flat. One of the things that we
cannot compromise on, e.g. in this case, could be that this facade or
Ethereum element or skylight cannot actually move too much away from
the outer edges. Because most likely
that we might have an opening in the
roof or Ethereum or at the edges of the facade. And then we must be this new part with the existing installation
or structure. And so we cannot really
compromise on that. That's why we can play
with these components or these ladders to kind of choose where we
want to compromise or not. You see that now
because of that and the parameterization that we
are not following anymore, the diagonal are the, actually
the original surface grid. This is what we are
getting as a result. You can see the original grid. If I now increase, let's say the anchor points and bring these back where they were trying to push
them back again. You see it's pushing them back. But now I don't have
any more flat panels. If I increase this too much, then I have no more flat
panels except for like there. You see, we have to make compromises with this
collection of components. It broke. Okay, I will reset it. Just bring these
back down to zero. I will rerun it. And we'll keep this there. And let's bring this up slowly. You see it's now
sliding this way, trying to play in
the rise of them. Now you see that here
it's doing that problem. That, well, what I will
do, bring this back down, bring the slider for the anchor
down a bit. Not too much. We'll bring this back up a bit. So we don't see
that happen there. And when we increase this, tried to do it slowly and wait
to see what would happen. Okay? Slowly will actually
bring this back. At this one, this one
up the diagonals. Then bring the
anchors down a bit. You see, so there is
now a working, okay. So now here again, in order to pause it, I double-click on this one. And if we are now
satisfied with the result, that is like maintaining
more or less the shape of the panels
like the quadrangles. Also, it's maintaining these the outer edge of the
original surface. And now let's check
the experimental part and afterwards the
visualization. Let's go back there first. So this one, it will apply
a smoothening effect. It's coming from kangaroo
goals mesh and then smooth. And for this one, it would
depend on what you need, on the situation that you
would like to use it. Or I will show you what it does. So I will connect this one here. Okay, not reset it. And now let's see. It. Does this affect
if I bring this a little bit down and
this on as well. To make its effect
more apparent. Baroque rerun. Actually the brain arise is
too big in this case here. Let's bring this down a bit. This one as well. Bring this up. And we'll go back to this one. It does this kind of effect. Like a smoothing effect. Broke again. Alright. Yeah, this is what I
wanted to show you. It does that thing. So it could be that you
would like to do that? I would like to reach
something similar to that. It's just smoothens
the mesh basically. So that's just for you to know that this component,
this effect exists. So you could actually try
that whenever you need it. I will allow to take this out. And you see that while
working with it, I had many times to reset because once we're
using high values, this might overpower other
forces that are being used, and then it might break. So that's why you
might need to reset several times until the
final result is reached. I'll bring this back
to the working result. And then let's try to
increase the polarization. Okay? Alright, now
we'll pause this again. Now, let's go to
the visualization. So I am now here turning these off and I'm doing here the
same as we did before. We'll enable these
and preview on. And I've done here the
same as previously, where sorry, I need to
turn this off as well. Okay, So the same thing, which is first from the meshes. Extract the boundaries. These ones explored them, build a four-point surfaces, and then you centroids of
the surfaces trying to find the distances to the original
surface with the centroid. Finding the distances
and then extracting the domains minimum and the
maximum of these distances. And then using these along with all of the
distances in order to give a color to the resultant
based on these numbers. Basically, as we
have seen before, it looks like in this case
we have this area that is farthest from the
original surface with one, that one as a
distance. Basically. And also I can now
turn on this one. So this is about
the deviation of the panels from the
original surface. And this one is about the deviation of the panels vertices from the
original surface. And so for these points will also have the same deconstruct
mesh from the mesh output, got the points or the vertices, and then remove the duplicates and then did the same thing. So distance between
point and surface got the bounds and then use
these start and end. So minimum and maximum
values with these, with this gradient
to give them colors. And you see here, it also
makes sense that in this area, these points are the
furthest from the surface. And we also have
more points here. And then all of these are the greener ones that seem to be closest to
the original surface. And also as we saw before, we can make small spheres and then give them the
same colors as well. Alright, I will make
these preview off this off and disable
all of these.
19. Planarization of Meshes and Polygons Part 4: Let's go to the last step, which is about binarization of polygons with circular
and spherical popularity. I will enable these. I will keep these
disabled and we'll explain soon why I did that. And now the thing is here, I'm using only four
points from Rhino. And these have been drawn
inside of this layer. Points. Four points. These are my points. And now what I'm doing
is I'm building a k2, r3 mesh with hexagonal
subdivisions. Before we've talked
about what is meant by spherical and circular
coplanar city. And in order to understand
how this vehicle and circular collinearity components work and how they affect the simulation. Let's see what would
happen without them. So during this off, so I have here the four
points, these ones. And I'm making out
of these surface. And then I'm generating hexagonal cells
subdivision with lunchbox. And then here I'm exploiting them and then extracting
the segments in order to. So what I want is to
make a k2, r3 mesh. So I need a weight that would be applied to all
of these segments. And for that, instead
of using a load, I'm using something
called dynamic wait one day coming from goals line. And what this does is
that it's a load in the negative z-direction which updates its magnitude according to the length of the line. Basically that's what it does. So the weight here is based
on the length of the line. This is one component. The second one is I'm using a length line to
maintain the lines, maintain the segment's length. With this length line component. I will actually enable this one. It's to make all of
the points planar. So the co-planar component
with the points. As we saw previously, with the hexagonal subdivisions. We will see these
ones after that. But before we see these
also have the anchor points to anchor the four points and they replace basically. Now, if I click
there, turn this off. Keep this one on. The flat surface is
generated. Reset again. Now, make sure that all
other previews are also off. Now when we start, obviously
these are flat, right? That's why we see
them like this. If I turn this on. Okay, first, I need
to bring this down. This one as well. And what I think it would
be good to turn this on. Okay, turn this back on. So we are getting this result. It's a category mesh
as we saw previously, but now based on
hexagonal subdivisions. And when I increase the
strength for the length line, you see that now it's
going down more. So it's maintaining the lens. Of course, if I do that, I will try to flatten it, but we don't want
to do that now. And here this is the dynamic
weight pushing upwards. You see that even
with a small value, it starts to react. And the Copeland arity is to make everything
planar as we saw before. So that's what we can get now with what we
have as components. However, when we tried to add the circular
coplanar, righty. Now we will see
what would happen as a result, as an effect. If I enable these. Well, you will read on this one, start slowly, this
one increasing. So what it does is that
it adds this effect, which is similar to as if, let's say we have a ball. Sphere under the mesh
pushing upwards. If I disable this one, we get the normal category mesh. Lucky to revolt in a way, if I enable now this one, we get this effect as if like there's a ball
pushing inside upwards. And if I increase
this a bit more, okay, these are not
planar anymore. I also have to
increase the polarity brain arise these ones. So this is the effect
I wanted to show you. On a similar note. If we go to kangaroo
with two goals, goal, we can find all capillarity
components in there, including co-linear to
maintain points along a line. And there's also the
coast spherical. And you would think, okay, let's also try
cause spherical. But in this case
it doesn't really do the job as expected. If I now enable this here, I'm actually connecting this one there and I'm disabling
this one. Rerun. Can you guess why
it's kind of staying flat and not really
changing anything yet. It's actually because
we did not start with a low value
for the popularity. So it overpower the simulation by keeping the geometry flat. So we need to first bring this to zero to launch
the simulation. That's why we have
to release this. Run the simulation and then
increase this to print arise. Now, let's do it now Let's see. Okay, binarized everything. So the cost frugal, does this affect
which is not K13, but also not totally spherical. A little bit different
than the code circular. Although the components
actually called cost spherical. It doesn't give the
expected result, but this one does it better. If we see this again
in comparison, you see this is like a
bigger ball pushing upwards. So in any case, you may
want to use this one. It really depends on what
you want to do, basically, what are your
expectations and goals. But just to let you
know that these two have a similar effect, this one provides a more
drastic effect as like a big ball pushing
upwards from inside. Alright, so I think I will
keep this. There are there. Now. One thing concerning managing the results and data stream, as we saw previously. Like it could be that
sometimes let's say here, when we had this
and I want it to extract the mesh
only while having several types of elements
going from the data output. And I use the mesh and
then clean the tree to only get the mesh without
any invalid or empty fields. With this, there is another
way which we can also use. It's called entwined,
which is similar to merge, but this one will merge for us trees while maintaining the
brand structure of the tree. So basically because of the show component that is actually linked with
the hexagon cells. It is now in the
first input here, the output of the solver. The data here is
maintained with this one. The output of this one
being the hexagons, all of the polylines basically. So from here, I mean, this one, the input
for all of these ones. These ones. So it maintains them. Otherwise, it could just use the curve component
and then try to find out all of the closed
curves and then dispatch them. That could also work. This is a different method, basically using the end-to-end
feature of maintaining the brand structure in the
output from the solver. The output here. And then I can apply the
boundary surface. So these are two
working methods. Now, if this is something I
discovered while setting up the exercise to show the difference between the
emerge and they intertwine. I tried to run both together, and it could be a glitch. I found that they would not work correctly together
simultaneously. If I now run this one and I preview this
one on and this one on, I also reset this one. Actually will have to decrease
the co-planar as well. And then when I
start to do this, one of them starts to break and you see it's kind
of a strange behavior. You may find like
a weird results. It seems to break down. And so that's why Be careful. I mean, normally they
should be identical. There is nothing changed. I mean, the same stream of input of forces is
exactly the same. What somehow, because
I have both working. You see it kind of
does this somehow. And that's why be careful if you want to
do solvers together. And also with, let's
say int1 then merge, tried to deactivate one and
then only use the other one. So I'll disable this one. You see now it's
going back to where it should be enabled. Now, this one, okay, You see, they should be there. Now, if I rerun this one,
Let's see what happens. If I increase this. You see, it's a bit weird. I don't know why,
What's going on, why it's happening.
Something really weird. That's why if I now
disable this one, e.g. and in this case, I rerun
this one transdermally alone, but together it will not work. So that's a small
interesting discovery while testing many,
many things together. So please be careful that if you want to run two simulations, are two simulators and also two different inputs merge and
entwined at the same time. You might face problems, so be careful about that. All right, I'm going to
pause this this one as well. Even if it's disabled, disabled everything disabled
all. To reset the file. And I think that's
it for Unit four, then you very much
for your presence and see you at unit five.
20. Learn how to simulate Organic Tunnels: Welcome to Unit five class. In this unit we're
going to look more in depth about organic totals
and developable surfaces. Now, let's start with the organic tunnels.
On this side here. Something important to
understand while working in kangaroo is that we always have to make sure that
each mesh side or corner or vertex matches
with its neighboring side. In terms of mesh
division or vertex, any mismatch may result
in a failed simulation. So let's take a look
at this example. I will not do this one
here and this one there. Alright. So here what I've done, I built manually a mesh. It looks like a pipe with
rectangular profile. If you see this without
seeing the mesh wires, make sure to go to
the Display tab and turn on mesh wires. So we understand how the mesh division is
actually working. And this actually, this is
actually really important. The goal of this part of this exercise is to show
you what happens when we have either matching
or mismatching divisions or
subdivisions of meshes. Basically in this case, the first layer here, It's called mesh clean, which means that I've already cleaned this one and
now it's matching. We see that the subdivision of all of these mesh faces are equal or matching with
their neighboring faces. Alright? These ones here, all
of these are matching. Well, look manual
instead of rhino. And what I've done here is
first, I referenced them. I will turn off this one. I made sure that the beginning
to prepare the mesh. So by joining and then
welding the vertices. So here, when I hover over this, we have all of these 14 meshes. And you see that the
v and the F count, the vertex and the face counts. And when I joined all of them
together, we have one rash. As a result, with this number of vertices
and number of phases, the first step is to
smoothen the mesh. So from this, I use
this smooth than coming from mesh
utilities smooth mesh. This result. This is the first step. And here you can later play
with these values. I will keep them
as they are now. And then as preparation for
the kangaroo simulation, what I would like, what I would like
now to do is to take from this mesh
first to show it, to get it as a result. Because now this
is like one part. Later on work with it. I need the edge lengths
and I would like to control these lands
and anchor points. So basically for
the edge length, I would want to have a certain
control over the length. And the anchor points as well. I would like to control, well, the points, these ones,
these outer points, I'm using the naked vertices
component coming from kangaroo mesh, naked vertices. So only these ones. Okay? Alright. And now I connect the show, all of these and then
the show edge lengths anchor points with merge. And I will actually make
this bigger, the smaller. Keep this one on so we see
what's going on there. Alright, and now I will
just use the normal solver. I will click on this one
to activate through. We can see now the mesh
without the vertices is E. So we reach this result. Now it's converged. I can now pause it. And so basically, this is
one way of making tunnels, as we could call them. And in this case,
what if, however, we had similar
looking mesh faces but without matching
faces actually. So I actually made another
layer here in Rhino. In this case. What I've done, this is the first step
that I started with. And then I defined refining
the mesh to reach this step. I started with the measures without having matching faces, and then I increased
the face card in order to make them all matching. But actually this was the
first step, the unclean one. So I'm showing you now the
clean way of doing it. And then now the unclean
way, the unclean mesh. What did the results actually
would be using that. So you see that for this
example with this face here, you see that the neighboring
faces on this one are not actually matching
with subdivisions. Neither here. You see that they are
like double and count. So now either we
need to decrease the number by half or decrease, or increase the number of
these ones to double them. These ones are matching
fine. These are matching. These are not matching. Matching. So some
parts are matching, some are not matching. Here are not matching at all. Okay? So I follow it
again, the same procedure, actually, the exact same steps with smoothening of the mesh. You see now here from the beginning before
starting the simulation, after cleaning the
mesh and reaching the joint and welded mesh. Now here we get this result. And that's because we did
not have here matching will turn this on matching subdivisions of the
measures of the phases. And so basically when we
start with this result, whatever we do later, it will not give us
any cleaner outcome. So I do this, I can click on this
one, simulate. Then I can run it. But because it was already starting with the mistake
or with an error, let's say not really built
correctly or properly. That's why we get this result. Alright, so I'm gonna
now reset this one. Something to be really aware of. This is a quick example to
show you the importance of starting with the clean
geometry, correct geometry. So that later on you will not
have or not face problems. If you look actually at
this definition closely, we have nowhere,
an error message. We have nowhere, like, you know, like an orange or a
red component saying, Hey, be careful there is
something not matching. And just doing it, what's supposed to do, Just doing the simulation, what's expected to do. And since the vertices
are not matching, it's giving us this
result because we're already giving it
a wrong with geometry. And going forward without
showing any red flags. Saying like, Hey, be
careful, something is wrong. But we, as designers, need to be careful as responsible designers to start with correct and clean geometry. So that's the first part. Let's disable this one. Now, I would like
later on to test the second part. With this one. The developable surface and scheduling of strips
apply to this one. However, for the second part, I will now start
with a new example. Before diving. In the new example. Let's have a short
description or introduction about what
is a developable surface. So here are a few definitions
that we can find online. I found two interesting ones that capture the definition of developable surfaces with
different formulations. Developable surface, also
called a flat surface, is a ruled surface having Gaussian curvature k
equal to zero everywhere. Developable surfaces therefore
include the cone cylinder, elliptic cone, hyperbolic
cylinder, and plane. This coming from this website,
mathworks.wolfram.com. Another definition
is as follows. In mathematics, a
developable surface or doors is a smooth surface with
a zero Gaussian curvature. This is a surface that can be flattened onto a plane
without distortion. For me, this is the most important part of
the definition. It clearer for formulation that I can grasp
better as a designer. It can be flattened onto a
plane without distortion. Okay? It can be bent without
stretching or compression. I'll also show you
these two websites. So this is the first reference. They don't provide any diagram. This one, the second one, they provide this small
diagram showing a cylinder. And this is what
they mean when they say that it can
actually be flattened. So it can be flattened onto
a plane without distortion. Imagine the cylinder. We can actually unroll the
surface and then you can make, we can make it flat
onto a plane without stretching or compressing it. So that's basically
the definition of a developable surface. Now, what is an
undeveloped will surface? Non developable
surfaces are variously referred to as having
double curvature, doubly curved, go
pound curvature, non-zero Gaussian
curvature, et cetera. That's actually the opposite. It is not developable. We cannot flatten it on
a plane without needing to actually stretch
it to make it flat. Basically, this coming from
Wikipedia, actually this one, the definition of an
undeveloped resurface as part of this page about the
development of surfaces. And also they have
the same diagram. It looks like it's the
origin is this one, this website also having
the same formulation. And here we see the
different diagrams of cylinder, cone, etc. And here where they talk about
the non-verbal surfaces. Alright, now, there's an interesting online
tutorial about building a developable
surface where the grasshopper and
kangaroo by Daniel biker, who is actually the
developer of kangaroo. And so instead of me now explaining to you
about how to build it, this is interesting tutorial
that is well detailed. And I will also show
you here the tutorial. It is split into three parts. So part one, part
two, part three. And for me the most
important part, the most important section of this tutorial is how to
start building the mesh. How to have first a mesh that is actually correct or proper, be unrolled with flat strips. Basically. This topic is any way related to the first
idea that we saw here to have a correct mesh
that we can start with, which should then lead
to a good result. Here. Actually, Daniel Parker spent
a lot of time on explaining what do we need first to build a proper mesh that we
can have it strips, subdivisions to be later on
unrolled on a flat plane. Here he mentions how to
draw the initial mesh. Like with these steps, with specific steps to take into account while modelling
the mesh in 3D. And explains the process step-by-step using the
kangaroo components. So this is part one. And actually what is interesting is that he included
the grasshopper files. This one here, developable
strips tutorial. It is a file with kangaroo one. And you can also find the link here that you can
download if you want. You can either
copy this one into your browser or you can just click on this one
here to download it. And interestingly, under the comments section
at the bottom, it actually includes the link to Kangaroo to the same definition, but we can go to Part two. He keeps explaining about
the following steps and how to refine the mesh to prepare the mesh for the later steps for
flattening of these strips. And the last part is actually
the kangaroo simulation. And then after the simulation, I will get unroll it. So I will now not spend time on this in
particular to explain the steps it's there
for you to read through and you can check
them out in detail. What I would like to say
is that for our example, there's actually the file. Again, go to part. I pasted it here for you. It is part of this file. And what I've done is
I only reorganized the first part before the
simulation, before the solver. I organized the same way that I was explaining with
the previous examples, the steps of discretization of geometries in order to reach geometries that can
be understood by Kangaroo, to be simulated. And also with the
kangaroo components organized like this. So actually it is
the same thing. All of this until
the simulator here, the solver, or the
same exact components. I just to organize them
basically and labeled them in a way that is easier to understand for we will
or learning kangaroo. But before showing you what's happening
with the component, my main interests
here is about that. Well, what comes afterwards with the management of the flattened
strips and how we can organize them or present
them in a way that is understandable and can be also shared with
other designers, consultants, engineers,
or fabricators. And that's for me, the most important
part of this unit. So let's go back to
the initial part here. So we saw before here that
explains about these steps. Let's see quickly the
simulation animation. So it starts like that. And once the organic
tunnels are formed, then we have the strips now
flattened onto a plane. Basically. I will nudge this one. There. I'm going to close this. Alright. So this is the original mesh that
actually came from well, with Grasshopper
definition file. And here are the steps that are actually part of the definition, like refine, clean, et cetera. And we have these steps here. These ones, these
components for kangaroo. So let's have a quick look. We have the show, you include the mesh because we
want later on to work with it planar as component
to pay rise the mesh faces, length line to control the internal subdivisions
of the faces or the edges. So we want to
maintain some points on curves or the outside. Maintaining these ones,
they're these ones. Then we also have
the equal length. Maintain these ones not so strongly with the
strength of one. So here we can see the
values given to the forces. So we can see that you
are actually kind of like using a really high
number for strength. So 100 is the
maximum value given. We have seen before that
in previous examples. Binarization of surfaces and meshes that are used
for some components. Really high values like with thousands or tens of
thousands or hundreds of thousands as values. Because as I said back then that we would like to
maintain the anchor points or I want to maintain
the length of the lines. And also I want to compromise on the distance from the original surface, e.g. or I want to compromise a
bit on the external edges. What I wanted really to make the polarization strong
and working everywhere. So I gave an extremely high
value for the binarization. In this case though
it is not the same. And so here we can see that
when we start with this mesh, Let's go back here, this one. And when we run this simulation, as we saw previously, okay? You see that it's kind of drifted too far from
the original shape. So it was previously like this. One, I click on it.
It became like this. So actually erupt really interested with keeping the resultant close to the original. Because the main intention anyway is to turn it
into an organic shape. And then later on try to
flatten or unroll the strips. So you see now how
it looks like. It had sharp corners, but now it has smooth
external surface. What I've done actually
in addition to that, is that I baked this one. I'm going to turn it on. So the original one, I baked it, this
layer, I locked it. I don't want to touch it. And then I actually made
another one like this. Just copied it here. And then try to
stretch some edges, different directions so that
I can just double-check it to see what would happen
if it will still work or not. So this is the Edit Mesh. If I do that, I hide this one. I go here and I run it again. And also it works
fine as expected. So we don't have two
problems with this one, even when we change
some of the edges. Okay, now I'm going to stop it. I will relink the original one. But this was just like it. That's the quick test to
check whether it's going to work with other
shapes or not. So this one is there. You have seen before that
we're using entwined, in this case with the show of the mesh from the
strips here coming into the first input of
the branches and then output from the first
branch. Output here. Alright? Now posit is now
converged and paused. Now until here, it is exactly the same part as the original definition
from Daniel picker. But then afterwards I
follow another procedure. I will actually show you
what he has done here. So we have the strips. So if I run it now,
starts running. Let's turn this to true. Okay, Now it's running. And then we get this
one still running. I will right-click and then
set this to false to posit. Now this is called edited
them and this will allow the data to follow from the other side
when I click on play. And this is important
to use as a tool. Because if I don't use it
and I'm using a procedure to enroll all of these
strips and then orient them in a
certain direction. It will maybe freeze or
take a really long time, or become really slow
while doing that. Because it will always update
with lots of geometries, basically coming as inputs, continuously changing
and updating. That's why it's good to, once the solver is done, paused, that we can now transfer data from one point
to the other side. So click on this one. Now I have these ones here. I have these ones here. Stripper coming from
Kangaroo to mesh stripper, then unrolling all
of them like that. And now this unroll
with this input, when we use one, it means a complete unroll. It completely flattens
all of these strips. In other words, and this
is another data dam here. So then this part is
called laying out. It's laying out all of the
measures along the x, y plane. Like that. It's really nice
method to flatten all meshes so that we
can clearly see them. However, my approach to
this is actually what if we would like to make
a schedule out of this? We want to make a
schedule showing not only the parts that
have been flattened, but also maybe we want
to give them like tags, text tags, numbering, etc. So how can we do that?
21. Organic Tunnels Scheduling and Annotation: Alright, let's go to here now. From this output
here after the dam. And also we have the same exact components on row and then the mesh output. And now you're actually starts difference with original
part of the definition. And here I have divided the
process between flattening, orienting, as well as
scheduling the parts. Here we can see the meshes still on oriented with a list item. We have in total around 32
meshes during the rapid to false and only see
what we have. Alright? So the initial step is only
to check what we have. Everything is there
in place, etc. Now, what I would like to do, since every single mesh is flat because we have
a complete unrolled. What I'm doing here is I'm first orienting on the
world x, y plane. We'll just call it here x, y without the z. Okay? And then for that, I'm following this procedure. I'm getting the
message coordinates. Actually. What I will do, I will show
you here only with one. I will take just one. So I'm taking the MS corners and I'm building a
four-point surface. With just the first four points. It can have more
than four points. But since all of these
points are planar, I'm using the first
four points to build out of these first four
points is surface. And I know that this
reference is a flat surface. Then I'm using evaluate surface. And I'm using the frame
because I know that this frame is the flat
frame representing the flatness of the surface or the orientation of
the surface in 3D. And then I'm orienting. I will connect this one. I'm orienting the surface here. We see more elements because of the list length
of the centroids. So let's check that out. So basically what
I'm doing here for orienting and in parallel, I'm first extracting from all of the measures, their number. So we have 32 values, so it's list length. I am using a division by four. We can use another
value if you want. But my goal is to build a square grid of
four by something. In this case, it's 32/4
is equal to eight. So this is a parametric grid, automatic grid that will generate for
ourselves and points. And in this case, I'm
using these cells here. I'm using the center
points in order to actually orient these, all of these meshes onto the center points
of every single cell. And because here
it's this part here, I said that I'm using only one, applying this to only one to
show you what's going on. Now, if I bring the connection, the linked back to this one, I will bring this back to all of the meshes and all
of these ones. And so now all of the measures, I want to orient them based on their respective
source frames, individual frames that
you can see here. And now with the target being
the center of the cells. All of these centers. I know when I do
that, then I click on this and then I have all of these meshes oriented
inside of the cells. Let's turn the cells on a
strict these out, okay. So from there to there. Okay. And now what I, what I can e.g. see is that some are not aligned with the
center of these cells. So for some reason. And so for that, I'm extracting out all of these meshes here, these center points
or centroids. And I'm building a line between these center points and the
center point of these cells. And then I'm moving all of these meshes towards
the central point. So then I click on this
and click on this. Well, these ones. Now I can see that they moved a little bit more to the center. If I select this one, they were there and now they moved a bit towards the center. Now they're centered
inside of the cells. Now what I would like to
do next before tagging is that it looks like maybe I want them to be looking similar. Maybe all of them are oriented
in the same direction. In a similar one. Maybe along this one,
or maybe two, this one. And not in this direction. That could be something that
we want to have, maybe not. But let's try to see how
we can actually do that. First. I will also
start with one. So here I will use a list item. This one, this one. Okay? And also connect that one there. And basically the idea here, the strategy here is that I
want to find the longest. If you want to think about it, an analogue way, not
in a digital way. What if this piece
of paper, e.g. a flat piece of paper in
front of us on a table. And we want to rotate
it or maybe align it, align these two edges maybe
along the x-direction. You know, like, you know
what, I just rotate it a bit. Then one method out of
many other methods. But one method could be
that I would extract the longest distance among
all of the sub phases. Then try to find the line
between the farthest phases, which means the
longest distance. Once I find the line
that I can orient this mesh phase from this
line as a starting point, as a starting source
towards a new direction. From this point, let's
say, see these ones. This one is starting
source from this point oriented in the X-direction
with the same distance. So like a rotation, we could either call it
irritation or an orientation from this position to a more straight position
along the x-axis. And it would be
interesting to find answers online about that. Actually, I found this
interesting definition. I'm not using all of it here, but just part of
it that's coming from and it's coming
from this source here. This online post on McNeil
rhinos official website, where there is there was like a topic about finding the longest distance
among the points. And when you visit this website, you can actually find many of the proposed solutions by
different participants. I found this to be the most, let's say working in this case. For this example. Let's go quickly
through the definition. Let's look here. So we have here the
mesh face, faces. We have the areas of each one. And then we have like a
procedure using reaching with all of the
distances is being sorted and then finding
the longest line. And then here I actually
added this one myself. This component, the end points. And then I'm finding
here they are x values. And then I'm sorting them and sorting the points based
on their X values. So the one was the smaller one. Always make sure that I'm
starting with this one. And then I'm making
a line knowing that this slide is actually
in this direction. So for this point, towards this point
and not vice versa, That's why I'm making sure
that this is controlled. And then I'm moving the first point towards
the x-direction, using this line as a
factor of movement. And I'm getting this line. And for the final step, I'm using the Orient direction. Orienting. This geometry
based on this line. With the point a is this one. Direction a is this one. This line. And point B
is also the same point, but direction b is this line. And then now I'm going to rotate this one from this
position to this position. Okay? It's not a very
complicated procedure. And then we get this. Once we know that we can
apply this to one phase, then we know that we can apply it to all of the other phases. So this is rotating only one
mesh in the direction of x. Now rotating all of the
measures in the direction of x. So instead of using
the list item here. Only applying list
only the first one. Now without using this one automatically or sorting all of these following the same
procedure, reaching this. And now we see that there is, there is an orientation some of in the
vertical direction, sum in the horizontal direction. Now, all of them are oriented in the horizontal direction. And after that, because
we hear hat explode mesh, part of this definition here, we need to make sure
that the mesh is clean. Again, join and weld all
meshes with this component. Either here I'm using this
one from weaver bird. This one joined
measures and weld. And make sure that when
we use this one to right-click on the world and
make sure that this is true. Because by default set to false, we can either do this or we can use what we have
done previously, which is meshed join and
then mesh Weld Vertices. The mesh Weld Vertices is
coming from the image plugin. So either these two
steps or weaver birds, one step, one component. I'm always like,
I always like to show different methods so that, you know, it's not always, let's say one answer, but it could be many
different solutions. Alright? This important step
of cleaning all the meshes. And then I'm now here again because you see
that now when we, when this happened, when the orientation of
these happened, now we see that there
are not any more centered inside of the cells. I'm using here the same step
of finding the mesh aerial a line and moving
all of the measures again towards the center
points of the cells. And then I'm using
the same here, areas of all of these. I'm making a line towards the center point of
the cells, these ones. And then moving them toward
the center points. Like that. Of course you could say we
would like to also orient these to be also pointing
toward downwards. You can also do that. I'm
not going to do this now, but you can also follow the same procedure finding
maybe this line orientation, maybe the shortest line between inside of this triangle, e.g. all of these you can
make as triangles, then shortest line direction to always point
downwards or upwards. So it depends on what
you would like to do for me now. It's fine. I'm going with this. And I have all of these
now, well oriented. Alright, now what I
would like to do here, I will actually show
you the end result. And then the steps. I would like not only to have
these in cells like that, but as I said, I would like to make
a schedule so that I can later on share it. I can fabricate it. I can send it to other consultants
then designers to understand what are the parts that constitute this geometry, this be villian that we
would like to build. And I would like to
make this to have this schedule with
the strip number 123 and with the areas as well. So how we can do this? Let's go back to here. This step, we have the meshes. Let's make this a bit bigger. So first things first, I would like to
extract the indices. And I know that we
have 32 meshes. I would like to make
this automated. I'm using an index item
component and output of this is the same input from
the meshes in the list. And the item I'm extracting
the index list to be a list of numbers of
values starting with zero. However, we usually don't start the count in real
life with zero. Like we don't usually say the zero part then
the first part. But what we usually say
is like first part, second part, third, etc. We don't start with
zero and real life. That's why in this case, what I would like to do, I can right-click
on this expression and then here type x plus one. So I have done this one now here in this case I just
copied this one. Then right-click
expression x plus one. So it adds one to all
of these results. And now I have this result. So 0-31. And we have here 32 items because
it starting with zeros. So now it starts 1-32. Alright, so this explanation
of how we can do it, right-clicking and then
adding x plus one. Now, this is the list
of all of these strips. Now, I would like to make
a nice text out of it. Only 123, but I would
like to use here we concatenate component
coming from sets text. And this actually
inspired by Excel where cells can be
concatenated together. And this means merging bits
and pieces of texts together. When we hover over, it says concatenate some
fragments of text. We can also zoom in and add more inputs for fragments here. I'm only using here a panel. I typed inside of
it, stripped number. The first part, and the second part is
this list of numbers. And then let's check this out. I have now this result, strip number one, step
number 23, etc, until 32. So I joined this one and
this one to make this list. And then now I'm using this text tag 3D coming
from displayed dimensions. There's one year. In this case, we need to, we need the
location of the text tags. Here I'm using the center
points of the meshes. And I move them a bit down. And then I'm using these
points as the location. I'm using this concatenated
text as the text input. And I'm using this size here, this value to control the size. Alright? I left this one's unused. Color and justification. You can later on play
with these if you want. So first step here, we have the meshes. These ones, we have the
cells and now the tags. This merger is coming from
the geometries themselves, the meshes, as well
as from the cells here, the original cells. So this map shows both together. Okay, so here we
have the geometries. Here we have the
first text tags. Now what if the
consultant requests to have more information
about this departs the strips and they ask to have their respective areas
added to the schedule. The solution is simple actually. Since we have the meshes here, I'm extracting their areas. And I'm not using the centroids, but using the areas
themselves as values. I'm using this component. Actually, it's an old component, not anymore used with recent
versions of grasshopper. Actually found it also onetime
while researching online. And so what it does, it rounds up the values. We have now, let's say these
various areas of the meshes. And I'm using this
one to round these up to only two
decimal places, e.g. and then here we need
the values and we can hear you going to
control the decimal place, count, like this, etc. Here I'm using the
concatenate again. The first bit of it
is the area text. The second is the, these values, the mesh areas. And the third one, I will change it to millimeters square because the file is units are actually
in millimeters. So this is important
because there are actually no units
in Grasshopper. It's all based on rhinos units. So if it's millimeters,
we have to have this in millimeters. If it was in meters
or in inches, it should be changed
accordingly. In any case, this is
a fragment of text, so it doesn't really understand
what these units are, but only for us as a visual indication that
these are actually units. And now we have the
concatenated information. And I'm using again
another tech stack 3D using the same procedure of
the centroids of the meshes, but now moving them more downwards and adding
the areas as text. So we have these
ones and these ones, and we have these ones. And now we have this
interesting schedule. Alright. We can now organize it. And the way we want, we can adjust the grid, make it fit in the
landscape sheet, and also scale it to fit inside of a specific sheet
size like A3, A2, A1, or any
sheet size desired. That's really up to
you to take this forward in whatever
way you want. What is more important
and interesting to know is that once this is built, this text tagging or
scheduling of all of these, like whatever now would change. Here, it will update. So let's say now
e.g. I. Have this. I click on through
and I run it again. I pause it. I go back to the ****
I run this dam here, letting information
goes through. Then we will get this updated. I will turn this preview on. And we'll actually
turn this preview off. All of these.
First, I will save. If I try not to use the
dam to see a live change. Maybe that will either
freeze or break or not. And I will run this. It's becoming really now. I'll reset it now. Okay, you see it
starts like that. And now it's running. You can see that the strips, as well as their
areas are updating. It's a live real-time
change or update of the schedule of strips while
the solver is running. And so that's the
power of grasshopper. Parametrically speaking, that once we have
built something, it will actually
remember and go back following what's linked
with what basically. Now I will posit. So if I turn this on, this is the result that has been unrolled to flat
two flat strips. And then scheduled like that. Preview off. And I will actually link this dam because it's very
important, as I said before, to have this like a
security key in order to control the data flow
from one point to the other without having
to run all of all of these at
the same time and then making things sometimes, maybe freeze or even
break or crash. Okay. Now, that was about
this part about developable surfaces and
scheduling of strips. Now remember when I
said that I wanted to test something
with these elements, these ones, trying
to flatten this out. And I said that. Let's first talk
about this part. Now, let's check this out. How can we unroll these
ones and make them flat? Would that work? So let's try to do that. And here I'm not using this because I did not
actually start with it. This was the way of
building the mesh, but now we have already
the mesh itself. So what I would consider now is using the stripper
and the enroller, or these now actually work. And that's why I don't
have this part here, but only the stripper
and the enroller. So I will now click
on this Play button. And we have the stripper here. Click on the enroller. You see it doesn't work. This is because the
geometry itself is now doubly curved
or double curved. Or It's an undeveloped
will surface. In other words, most of these. But these ones that
haven't been actually enrolled as a complete unrolled are actually
developable surfaces, but not the other ones. And that's why here. When I turn these on together, you see that most of these were actually
non-diversifiable surfaces. And the thing goes back to the methodology
of modelling in 3D, where and how to start
designing shapes like shall I, shall we start with
a surface or a shape that is already developable
or not like this one. What are the constraints? Are we free to really reach any shape we want
to have or not? We have seen before
in it for that, we can use binarization
of measures so that, that could be also another
answer to this question. In this case, we saw that it is a particular specific
defined way of starting with a mesh
and building it in a certain specific way as the annual biker
was explaining in the three-part tutorial
and making it later and unreliable
flattening the strips. But that can only be achieved in this case
with this shape. But we cannot actually
apply this to any shape. That's why I'm saying
that we always need to think about the
intended end result. What are we going to
do with it later on? Maybe in this case,
I would need to apply not the unrolled strips, but maybe the
polarization of surfaces, which we have seen in unit four. So it really depends on what is the end result that you
want to reach our goal. And also, we have to think
while having that in mind, what is the methodology, the process that we need to adopt in order to
reach our goal. And always makes sure that
the start that correctly, even if we have a
methodology that is correct. But if, let's say the mesh,
as you have seen here, was not built correctly with mismatching faces,
then it won't work. So we have to keep
that in mind as well. Always as designers, as responsible designers,
architects, engineers, product designers,
in any type of field or discipline that you
are actually involved in. We always have to
keep that in mind. How we can reach our goal, what are the methods
to reach it, and what we have
to consider before starting all the
parameters necessary so that we don't face
obstacles in the middle of the process and lose
time and energy, etc. So that's it for this unit. And see you at unit six.
22. Origami Introduction Ron Resch Case Study: Welcome to Unit six class. In this unit, we're going
to explore how we can simulate origami geometries
with the help of kangaroo. Before we dive in details about the tools and components
that are going to use in Kangaroo to make origami geometry is to simulate or a gummy
folding patterns. I would like first to
talk about Ron Rash, who was an artist, Computer Scientist and
applied your geometry, just known for his work
involving folding paper, origami, the solutions
and 3D polyhedron. I'm reading actually
this information about round brush extracted
from this website. And I'll also show
you a quick excerpt from the run rush
paper and stick fill. You can find this video
under this YouTube link. Actually are going to quickly
watch few seconds from the film that I think directly relate to our current
work with kangaroo. And using the computer in order to make simulations digitally. All schools of
art, architecture, and design have classes they call a fundamental,
basic design. Perhaps even elementary
composition. These classes are usually given to bring the students into his initial understanding
of how the orders. Now we won't watch
the whole film, but I want to show you quickly about a few things that we're going to explore and kangaroo
and tried to apply them, inspired by his work, elevate, twisting,
rotating upward. You'll note also that
there's a kind of wing. Or i then determined that a square and a hexagon
folded in a similar way. So fold the paper up with straight lines in such
a manner that you achieve. Modules maybe derived from. I would like to take
you to the end of the film where already
mentioned the use of the computer and how it can help designers design and develop
their ideas digitally. Thus expediting the design
feedback loop until reaching a final working idea faster and more efficiently, which ultimately
boosts creativity. And it starts around there. Continually. People asked me, now that I've solved the
folded paper problem, why it is that I stay with
the computer business. In fact, many more
people asked me, how is it even possible
for an artist to relate to the computer field and to do research in that area. And a few of my work in terms of the months and
years that I spent fabricating models after I asked myself some question
about the geometry, it seems most natural to me. Design is a kind of feedback loop between the
artist and the environment, between the designer and
have some posed problem. It seems that the person isn't always in a position of saying, I wonder what will happen if or he looked at a
problem and it says, perhaps this will work and he
goes out and try something. New environment responds
by collapsing quite often is proposed solution
when he fabricates it. And then he makes
modifications and goes again, this kind of loop keeps
going back and forth. In the interim though there's
not much information. There's just a lot of labor
and a lot of expense. It's my hope that the
computer can become a medium in which these post
ideas posed solutions can be tested out. And the information coming
back from the results of this post and solution
can be modified. The computer can really
speed up this kind of design loop and I think
greatly aid creativity. The excitement for me is to try to develop the computer then as a medium for exploration and
as a medium for expression. So basically the last
bit of what he was saying is put in
there in text form. It is my hope that
the computer can become a medium in which these ideas until as a
medium for expression, I find this beautifully
expressed and formulated and actually directly
illustrates what now we're actually doing. So back then, when he was actually trying
to do in the lab, in the studio to build
geometries with paper and stick. Taking so much time and
effort and energy to reach the result that we have, like the shapes and his mind. Now with kangaroo, with
Grasshopper, with Rhino, we can really do this like an a matter of
minutes basically. So that's why it's interesting, exciting times now
that actually living that we can do this
easily and quickly. Additionally, useful
resources are listed here for the ones we're interested to know more in details about origami
tessellations. So this is the run
resh.org website, gallery page where we
can find a nice resource about Ron rashes projects
and experimentations. This is the one called dot
info website where you can also find a few examples
of kangaroo patterns. This for instance,
inspired by rashes, triangle, water bond pattern. Alright. There is
the online paper by Sebastian Collins
and a mirror that poor entitled From flat
sheets to curved geometries, origami and Katie,
Katie gummy approaches includes many
interesting projects that are mentioned here, as well as geometric studies
about shapes and geometry. This origami
tessellations.com website as well is a good resource for the ones who are looking for the latest updates and workshops and events going
on around the world. And the last one I want to mention as a resource
is Eric here, this website, which
is also will include that provides a
lot of interesting information about this topic. Alright, so all of these
websites are actually listed. Here. I will close the browser. And now let's look at
how we can actually play with origami and make
some nice simulations.
23. Origami Applications: Now we don't have to be an
expert in origami to do that. We're gonna see how we can
make interesting simulations. With kangaroo. Once you understand
basic rules of folding. And what is interesting
is that kangaroo two does not include the
organic component because there was actually an
organic component in Angular one, the
zero.099 version. And if we go to
the kangaroo one, basically now, let's
go to utility. There is this organic component. Now when we bring this here, what I've done,
I've put it there. So we'll delete this one as it's the same, the
same component. This component, if I
now try to click on it, Control Alt and
hold and select it. The usual way to find
components from the tabs. I would not be
able to do to find it because this is
actually a cluster. It came with kangaroo from
the tab as a cluster. And when you hover over it, it shows a thumbnail view
of the cluster inside. If we double-click on it, then we open the cluster
of different components. Some of them are actually
kangaroo components, like e.g. the synch points. And this one now coming from kangaroo from the mesh sub tab. And these ones again are
actually additional clusters. So if we double-click on
this one and open it, and you find out that it includes the springs
from line component, which we have seen before. And it's coming from
forces springs from line. I will notice guard and close. Go back to this one.
So what I have done is that I copied all of these into the main grasshopper file. Let's close this one. This is actually equal to this. What we have seen. And these two ones, this one and this one
are actually clusters. They include these ones. And these ones that are encircled are actually
kangaroo components. The other ones are normal
grasshopper components like CP evaluate, et cetera. Now we're not going
to spend a lot of time looking at
these specifically, but just to know the
background about this. Now, the next step is
to simplify the inputs. So we have this
kangaroo component and when we bring like this, when ring a new one, you see it. It has these inputs like mesh, curve number, curve
number, number. And it's not really
intuitive to let the user know what is meant exactly
by both curve inputs. Like why are there
two curve inputs? We need two sets of curves, and we need also the three
values, three value inputs. But we don't know the
description exactly. So what I have done as a personal preference from my side is to just rename this. I renamed this to
origami cluster kangaroo 0.099 to know that this coming from this
can grow version. And I also kept the mesh
as it is, the mesh input, but then I renamed these
ones to make things easier for us to understand
which geometry is we need, what would need to use for the
inputs, for the component. Where we would need to use something called
the mountains. So Mountain curves,
mountain angle, then valleys, Valley
angle and folding. I will now explain more in
detail about these inputs. What do they mean? However, this is
the same component, including exactly
the same cluster. But now with this renamed
inputs to make work easier. So origami is original
cluster inputs. Outputs have been renamed
for an easier workflow. And now it's always important to know that we are
using Kangaroo 0.099. So we have to have this plug-in version of congruent stalled. Alright, so now I'm going
to split the screen. And let's look at
the first example. S1. Alright. So I have called it a
trial run rash triangles. And here we have many sublayers. We have the nerves, which represents
all the surfaces. So these are not meshes yet. So it's open surface. Open surface actually I
traced around rushes pattern. I simply brought
an image and then I trace the pattern to
get these surfaces. So individual surfaces, not
linked, not joined together. And then I drew
over the mountains. And the valleys. So what does that mean? Is that these mountain curves will actually push the surfaces. The red crease lines towards the outside and the
valleys will push the blue crease
lines to the inside. Basically the opposite movement. That's why cold mountains and
valleys and the ones among you who have already worked with origami might have
passed by these terms. So Mountains pushing
up as mountains, valleys pushing
down like valleys. And this is the base
layer inside of which we make the
simulations. Alright? I'm going to adjust
the sizes here. Alright? So we said that we need
here the mesh input. So since these are surfaces, the nerves layer
includes surfaces. These are the surface
referenced here. All detached. I joined them. Then this is an important
mesh preparation step to first convert them to mesh
and then weld them together. And then this is
here a shortcut. The meshes here ready
for this simulation. The mesh of flat
folding pattern. And this goes into the
input of the mesh. I referenced the curves
of the mountains, these ones from this layer. And I have also used just
to be on the safe side. They delete duplicate curve, which is also coming
from kangaroo. And the input for the
mountain angle in this case. So this one reads angles in
radians and not degrees. So if we're using degrees, this number is ladder, e.g. we have to first convert this
degree angle into radians. And then we can use
this one as an input. And then we have
the values input. So we'll also have the valley
fold lines, these ones. And also the delete
duplicate curve as a security measure. Then we have the valley angle. So from degree, then
convert radians. Then we use this one for this input and for the
folding, we have numbers. Ladder is going to be from
minus one to plus one. If it was zero, that means
that it's not folding at all. So zero fold. And then either minus one, which inverts the folding
effect or one as a full fault. Basically. I will now here keep it at 0.5. And on this side, we have the kangaroo
simulator. This one. As a standard procedure. I flattened the inputs for the force objects and
the anchor points. These are the forces
and the output of this mesh is used
for the geometry input. Output. Now, the resultant
is coming from here, and I'm using here
a custom preview to give the color blue
color to the mesh. So if I now click on this one, I will see, you
know, the preview. Now nothing is happening. It is not computing
anything yet. I will just show you
soon when we can use anchor points and see what
the results would be. So these are now put on
the side, not used at all. Alright, so here
also one more thing. I found out with studying
these examples that the optimal angle
for the mountains, the mountain folding,
would be around -90 degrees or minus Pi
over two, basically. And the optimal angle
for the valleys would be around by 180 degrees. So that's what I've found. Of course, you can play with these angles
and change them. I will also show you soon when we change them,
what would happen. But these are for now, like standard default
angles that should normally work with most origami
folding simulations. Alright, so I think that's explained about
all of these inputs. Now, here, what do
we want to run this? You can go to simulation. One thing about the kangaroo, 0.099 is that when we
double-click on it, we get this simulator
control buttons. And then we can click on Play. And now it's folding. Alright. So you see that These lines here,
let's click on stop. You see these
lines, they fall to the inside, mimicking valleys. Now let's try to decrease this. You see how they
fall to the inside. And then these lines,
the red ones stop again. These red ones falling to the outside
mimicking mountains. And now if I increase this, so we see now the effect
more, increase more. See that there are now
folding to the inside. These ones and these
ones with the outside. This is now a full fold. You could actually
go even beyond one, although I don't
see that currently, we don't need to do that or there's no real
reason to do that. And what I was saying previously is that we
can actually reverse it. If I now bring this back to
zero, let's say no-fault. I reset and play. Nothing is happening because
nothing, there's no folding. But if I go to minus
a negative value, it will now invert the folding. So now the valleys become mountains and the
mountains become values. And so the effect is
now being reversed. Let's bring this
back to positive. It is as if we are now folding the paper and the
other direction. Let's bring this back to 0.5. Alright, now, here we have few
studies like small trials, where I built a small
pattern quickly with surfaces and lines in order to check the simulated results. And then after that, I built bigger geometries, which I will show you soon. So the second one is this
run rush quadrangles. If I select these ones
with this example, it is not actually a surface, but a mesh, an open mesh. And so in this case we
have the other option of just referencing
this one mesh. And then I will
just link this one there instead of choosing
the surface as previously. So we have now both
possibilities. You can either have junk trees
and surfaces or as meshes. I will now select the mountains. And then here right-click
and select will set multiple curves and also
do the same for the valleys. Alright, we'll turn these off. And now we see that we have the flat geometry
still on simulated. Now, let's double-click
on this and select Play. Let's play with
the folding value. You see how it reacts
life as we change it. You see how fast you
are able to now make these simulations
without touching any piece of paper or scissors. And later on we can obviously
print this pattern. Then we can use it. You can use these valley and mountain lions as
creased lines and then we can replicate
the origami with real paper or cardboard. Now, if for any reason
the mesh was flipped, so try flipping the mesh
and check the results. Let's try to type here. Flip, enter to flip the
direction of the mesh, and I rerun the simulation. You see that now
it's behaving in reverse as if given
negative values. So I was actually
expecting to get this, but because I flipped them, then we get this
opposite result. So this is also a good time to mention that the orientation of the normal direction of
the NURBS surface or mesh is crucial in order
to get proper results. And this also relates to the previous units
where we looked in depth at how we have to start with correct subdivision
of meshes, e.g. to have the correct simulation. So here in this case. Stop this one, flip this again, bring it back to the
original orientation. Alright, turn this off. Okay, so this is about this one. Stop it. Now, let's
check this one. And so this is trial water
bump with anchor points. This is the interesting
thing about this example. Also, this is a mesh. The anchor points are these
points, multiple points. The mountains and the valleys. Okay? Now, before I
connect the anchor points, Let's see what would happen if we just run the
simulation without them. So we get this result, which is more or less expected. Alright? Now, what happens if we
now connect these anchor points into this anchor
points and put play? Okay, now you see that it's
kind of being stuck there. If I now move these
points in space in 3D, it will affect the geometry. So although we see
this effect, however, since paper is not by
nature stretchable, this particular session is not
totally real, I would say. But let's see what happens
if I move it to the inside. Now, what if we start
with these points, e.g. this one not being
at this corner. If I now stop it and replay it, if I move this one, it will do nothing, not
affecting anything. Why? Because we did not
start with this point being at the edge,
at the corner. If I move this one, since this was actually started there and its original position. Now it will affect
the simulation. I will now undo because
this one has restored. Now the second simulation that was not in its correct position, in its original position, it was not affecting
the simulation. And that's why always important
to keep that in mind, especially when intending
to move anchor points. To have these
anchor points being on the mesh at the corners or vertices so that you can later on move them and then affect the geometry,
the simulation. This case, I'll move this one to the edge and also
move this one there. So now all of the points
are now in place, them on. So now if I play it, if I move it to
Lafayette again, undo. Alright. So this is a quick example
about using anchor points. And now the bigger example, which I'm calling here run
rush triangles, vase 20 sides. And basically here
what we have is this original pattern that
we started with previously. This one. What I've done is
that I just took a piece of it and then I laid it out this way around this
polyline like that. And then of course,
when doing that, always maintain the
mountain curves and the valley curves together. This is the base. Layout of all of the curves. I will now turn this off. Alright? And then now let's
try to see what would happen when
we use this one. I have here nurbs, not meshes, select all of these, right-click set
multiple surfaces. I connect this one there. Select these mountains. Right-click, assign these ones. De-select, select these ones, and also assign them here. For the valleys. Turn everything off. Only check what the
result would look like. We'll also take out
the anchor points. These are only for
the previous example. I will now run the simulation
and see what would happen. Double-click play. Alright, let's zoom in a bit. Stressed this one or so, it's now folding slowly. Let's try to increase
the folding value. So basically this increase
increases the speed, affects the speed
of the simulation. When we do that, it also marks the limit of the simulation
until it stops the folding. So actually what this
means is that if, let's say we would like to have some sort of a
geometry like this. Maybe like a vase or a lamp shade or wherever
you would like to build. Who would need to
start with this? So this is our starting point. And then when we build it, when we apply the crease lines, and then when we fold them, then we will get this
simulated geometry. I will now click on pause. If I liked this position, and then later on we can make
it and then render it, etc. I've actually done that
before with this one. Click to stop it. Then we'll rerun
on the week one. So this is one option, one example of this simulation. Alright? So this is with 20 sides. This also with 20 sides, but longer than
the previous one. And again here, we also have
a different big options. This make one, make two. So it's like while
being simulated, I would pause, bake
than play again, then pause and wake, et cetera, until
almost a full fold. Basically. Like that. Yeah. These ones. So all of these options I have
here, previously baked. And the last one I want
to show you is this one. Let's check this out. Referencing the surfaces there. Okay. Then the mountains. Select all of these. Then select all of
the valleys as well. Again, referenced them here. And let's turn these off. And let's launch the
simulation rerun. This is the run
Resh quadrangles. And this is based on
what we have previously seen there. This pattern. You see when I play with it, with this ladder, it will
affect the simulation. Well, obviously. And if, let's say who would like
to play with these angles? While the simulation is running. And I tried to change
the ankle slider, the middle of the simulation. You see that it will also
affect the resultant. The behavior of the simulation. So it's responding directly live to the change
of the angles. But as I said, these are like the standard inputs
to keep them at the -90 degrees and here
and then 180 degrees there. Okay? And some of the results that I already baked, or like this, one, like this, you can see that you can
kind of like warped results. Alright, so basically this is a quick intro about how
we can quickly with a basic understanding of origami folding of mountain
and valley creases. How we can achieve
it with kangaroo 0.099 with the
organic component. And the last thing I want to show you about
the zombie kangaroo. What is interesting
about this one is that it will
give us a kind of final result with a pre-set
maximum number of iterations. If I keep this at 5,000, e.g. and what I would like to show you again about
the first example. I think it's a bit freezing. I will see if I
right-click lock solver. Okay, what I would like to
do is replay this example. But with a zombie one. So let's reference these again. Alright? And these ones. Alright, During these off. And also let's disable this one. Actually. Yeah,
let's just table it. Alright. So it gives us
straightaway the result. We can play with the
folding inputs here. But it does not show the
bouncing of the simulation. It is just like a static
final result. Go back. Where does that? So that's why it's called Zombie kangaroo Because
there are no bounds. Now, the thing is that, let's say I run
this one with it. Play. Let's see
what happens here. It will not simply stop at where the zombie
kangaroo stopped. But we'll kind of
keep going a bit more because there is
no kind of a break to just stop at preventing
it from further moves. So it slides a bit more towards
the higher value result. Here, the, the, the
zombie kangaroo, which seems to have reached
66% or 0.66 value fold. But the normal solver
keeps going a bit more. That's why we would
ultimately need to posit to stop the movements are order to maintain one result
and then bake it. Otherwise it would keep
going forward slowly. So please keep that in mind. At any rate, I personally like more than normal kangaroo
solver simulator and not the zombie one because I like to
see the bouncing. But keep in mind that it won't stop where it reaches what is
actually supposed to reach. And then converge like with
the kangaroo to just keep going a bit sliding way
from the real result. In any case, I'm going
to disable this one.
24. Origami Exercise: Now that we have
seen an introduction about how we can simulate the origami folding
with kangaroo, it would be interesting
to actually try to apply the knowledge
that haven't been acquired through this introduction
into smaller exercise. And so basically the
idea of the exercise is that I will show you now the
behavior of the resultant. And it's a basic mesh folding. I will show you the resultant, the behavior of the
origami simulation. And you would need to
try on your own, please, to replicate it, to try to
rebuild it from scratch. I'm going now to
turn on this layer. I'll preview of this one, and I will preview on this one. Alright, so you have
already the file. Please try not to
look at the layers. What do they include? Try to please make a
new layer on your own. On this side, not this one. And try to replicate it. Tried to replicate the behavior. Now, basically we
have a flat mesh, a flat geometry surface. And the idea is that
we would like it now to fold like that. Basically with
these crease lines. Then you have it
folding that way. And if I now play with
this folding slider, I would get this result. And so to help you
out with the steps, because this is
important if you are able to replicate this example. I'm not gonna say
like sit forward from this first try that
this is the main goal. The main goal is for you to
understand the process and how the steps are organized
leading to the result. And once you understand that, then it would be much easier on the long run to replicate any origami pattern
that you can see. The idea or actually
the steps in order to reach the results are
summarized under a few points. So these are the steps that
you would need to follow. I'm going to do this. Alright? So basically
first observe the effect happening and try to guess how the parametric
definition was built, how the resulting
geometry behaves. And so there are a
few points to ask yourself before trying
to tackle the exercise. First, what would be the
base surface or mesh? What are the mountain curves? What are the valley curves? Is the geometry fixed at
a certain point or not? Or their anchor points involved? In other words, that's
the last question. So if I now play it again, well, actually bring this back
here and we'll keep this like that and
we'll play it. You see, we get this result. This is the behavior
of the folding. And of course, I've shown you
if I play with the slider, the folding slider, it will increase or
decrease the folding, but this is a basic
mesh folding. So please ask yourself
these questions and try to replicate this simulation based
on what you see. And you can just
simply use these ones. I just basically this
definition from here. So basically you can
use the same just here. You have to figure out
what would be needed. And it doesn't really need to be exactly perfectly
what you see, but something similar to it. Alright, So I would say maybe, let's give ourselves maybe 10 min to try to
figure this out. How you can build
this definition. With mountain and valley curves. All of the geometry is required. And then we're going to see this simulation
afterwards. Alright? So 10 min.
25. Origami Exercise Solution: Alright, so I hope
that you have achieved to replicate this
origami simulation. The solution steps, what
you should have followed in order to reach the
result is step one. So will the base NURBS
surface or surfaces. And I guess maybe if
we have opened this, I hope not, but this
includes the solution. So if I click on this
to turn this on, we first have to build
the base surface. And these are detached surfaces. As we have seen before that we can start with V-tach surfaces. We have to build the
mountain curves. And I've put them under
the mountains layer. And you can see from this, the behavior of this mesh
is that when it's folding, we have one crease line folding in this direction towards the inside, which is the valley. Then we have this folding
towards the outside, which is the mountain,
and vice versa. So the pattern goes as
one PS10 in this fashion. So it would be now easy
to build these ones. So we know that we have a
pattern of mountain curves, then valley curves than
Mountain, et cetera. So we built the first step, the first surface
than the curves. And also I've seen that when
we run this simulation, I will allow try to play this. It doesn't really move away
from where everything is because these four
corners points are kind of maintaining the
mesh location in place. And that's why you will also
have to add anchor points. So here, these are
four anchor points. That's how it is. So the last step is if there are any anchor points placed them at their most logical location. In this case, these four
corners important to make sure that the value given to the folding input
is not set to zero. That's important because
if it was set to zero, we'll see nothing, no
difference, nothing happening. Stop and play again. You
see nothing is happening. If I change this value. And every have seen before. If we make this negative, it will flip the effect from
mountains pushing down. Then the value is pushing
with the outside. In any case, that's a detail. And also show you if I don't use these anchor points as
anchor points and we rerun it will get this result. That's why we have to use
anchor points in this case, for this definition to
work as we have seen it. If I now play it again,
we get this result. One thing though, please. If you, while working
with the simulation, if you try to change the
position of these points, it will change as if we
have the origami paper or material in your
hands. It will change. However, if you stop it. And then if you play it again. Now this point is lost. Always, always, always. You have to start
with the anchor point being placed at the
original location. So we'll here under the
movement of the point. Alright, so now if
I play it again, you see now it's
back to the corner. Now I can move this one. I can move this
one. All of these. But always making sure
that I've already started with the points being placed at the original place. You can see that
since I'm doing that. So basically it's kind of against the nature
of the material of paper that it would
never stretch that much. That's why it's behaving
in a crazy way. And so that's why we get
this abnormal result. I will bring these back to their original place and
stop this one, undo, undo. Move these ones back to
their original place. So basically this is a
quick basic exercise about the basic mesh folding. And if you understand this
result, this exercise, if you are able to replicate it, then it will be easy for you. To more complex
examples that you can also look at them quickly decipher
how they were made. And you can actually just
remake them, replicate them. You can simulate them with
kangaroo easily knowing that you have the basic
DNA of the simulation, the basic surfaces, the mountain curves,
the valley curves. Alright, so thank
you very much for your presence and see
you at Unit seven.
26. Origami Lamp Shades Experimentations: Welcome to Unit Seven class, which is about origami, as well as a continuation
from Unit six where we started as a reduction about origami simulation
with kangaroo physics. Basically, in this unit, we're going to look at all of these experimentations
with lampshades. Some of these start
with the basic pattern. And then later on,
we're going to explore how that
pattern would be applied on the lamp shades
shape in a basic way. And how would the
results look like? Now we're not going to simulate every single one of them
like a live simulation. However, I'm going
to show you quickly about each one's
resultant simulation, which I've already
baked previously. So instead of spending time on simulating every single one, I've already put here all information that you
need for these simulations. So you can later on
redrawn the simulations. You can change them. You can add whatever edits
you would like to add. These are, I would say, the reduction to the world
of origami simulations. And more specifically
about lampshades, experimentations that are
actually based on origami. Alright, so let's start. As you can see, the file is
divided into parts or layers. Here for the first layer, it's about the Euro
already pattern. And then we have the
water bump pattern. We have lozenges
than your own Rush. Inspire triangles, quadrangles, exit triangles and then
hexagons and triangles, and then the spider on. And then last but not least eric year the
experimentations as well. And here instead of
the grasshopper file, we only have this part, this definition that's
actually the same as the one inside
of the unit 65. So you don't have
to change anything. These are just pasted
inside of this file. So you can use the
same definition. I wanted to just
separate them so that we don't get confused
with the files. Alright, so here
with the first one, the mural already, I'm starting now with
the flat surfaces. Let's just make
this a bit bigger. So the flat surfaces, These ones are flat and
detached, not joined together. And then if I do this, if I select these and
reference them here, then I select the mountains. Let's hide the surface
to see the curves, the mountain and valley curves. If I said the mountains
and the reference them here, then the valleys. I referenced them here. Let me bring this, maybe, something like that. Alright. Now when we
run this simulation, double-click and play,
I get this result. Then I can go back to this folding value
and I can change it. So that's the
behavior of the mural or a pattern basically. Okay, So knowing that then what I have done
for this second one, so equal long 2 cm as
this, this is the result. So basically instead
of every single layer, if we open these layers, you will see that you
have the geometries that are the base for
the simulations. So we have the NURBS surfaces. Sometimes we may
have meshes as well. We have the mountain curves
and the valley curves, and then we have the
different resultant variance. So in this case I have
a Beta-1 and Beta-2. And the variation, the various baked
results are baked at different times or intervals showing how the result
in geometries would look like and each result baked
in its respective layer. And the origin of this shape
is not at all circular, but there's actually
rectangular. So it has four sides like that. And based on what we
have seen previously, this flat one, then we're
applying here the same logic. And then here we have
the mountain curves, the valley curves like that. And then we have the results. That's what we're getting. So this is how I
describe the results. Long, 2 cm square, 8 cm, which includes the size of
the initial NURBS surfaces. If I check the distance 8 cm. So this is how the size or sizes are described
with the layer names. What is it about? What is the starting
point of the origami? Basically, this is having
this shape as a result. This is the mural or equal
square eight as well. This is a bigger
one with a 40 cm. And so we can now try
to imagine that these, actually, these shapes
would look like lampshades. And in order to get this result, if you imagine the
lamp shade hanging from the ceiling
having this shape, then in order to get this shape, you have to start
with this shape. And so if you want to
fabricate this shape, there are two options. Either the first option, which is more genuine, is to laser cut these shapes
and add decreased lines. Of course. So that when we
are fabricating these sheets of paper or cardboard
or thin cardboard, whatever material
we would like to use to make the
origami lamp shade. Then we would know
where we have to make a decreased lines and in which direction we would
have to fold them. And so actually, what I'm now reaching to is this example. So let me first show you
until we reach that one. Few of these different
options if we make them longer or shorter, etc. This is the water bump, origami. It's a different base pattern. And this is based on this one. Okay? So most of them have a
squarish base layout. This is a bigger one. Now this layout with
the unrolled for laser cut at the end is where we can find the layer
here called unrolled. And what's going on here? I will just minimize this one. What's going on here
is that I'm taking these sides and I'm
enrolling them on the flat world x-y plane so
that I can later on laser cut them and then I can fold them following
these crease lines. And the thing is
that for this one, I just had to take,
just copy these. Let's go to top view
and take this one, selected this side, and
now I copy it like that. Let's try to move it a bit. Oops, I think it looks like
I took one line by mistake. Alright, be careful with that. It's a simple rotation. Just rotate it. That's the top view. Here. I don't need the surface. I can remove it. I can move all of
these surfaces. And then I'm left
out with these. And then I can also add here, I added the line type
for these layers. So I know that the ones
that are more spaced out lines or the
mountain creases. And then the ones that are
denser or the Valley Crisis. So that's when, that's how
actually you can laser cut them and we know
in which direction we have to fold
every single line. So that's it for this example. Just need to take this
original geometry. Then work with this one
and not with this one. Right? And the other option, one option is to do that. The more genuine origami folds to have a real origami
lampshades hanging. The second option is that we can just simply
3D print this one. We can give it a thickness. I can give thickness
to the mesh. And then after the simulation, and then you can 3D print it. We can go down to maybe half a millimeter
of thickness and then we can 3D
print this one. So it depends on what we
want to do with it and what technologies are available for us to manufacturer
the project. I'll clean this up, keep this one like that. And so basically this is
the unrolled as an example. So we have two sides and then two sides of the
bottom side here. So we continue with
the water bumps. Now the lozenges. That was a test to check
how they would behave. And if I go back to this one, It's based on this pattern. And I get this result. These are square based variants. This is another variant as well. And with these ones,
the resultants become kind of
worked geometries. So these are quick
experimentations trying to find out how would these
resultants look like. Now, going back to run rash. So these are inspired
by Ron Rash patterns. You can see the various
proportions and sizes involved in this case. Now, let's also see
the next one as well. Because there are similar. The second case we'll
sort of the previous one. I use the anchor points like
Angkor corners basically. So for these corners, I use these points
to be anchoring. So they maintain
the squarish shape. Obviously, if you're folding
the origami with papers. And then we start, let's say with this layer, with this start here,
with this layout, we will not end up
naturally with this one, but with the circular one. And so in order to get
this result, particularly, who would need either
to 3D print it because it's fixed as a
geometrical shape. Otherwise, we would need to
make the origami folding. And then we would have to attach or constrain
these corners, these corners curves to a certain element so that
we can maintain this shape, basically, the square shape. This is with the quadrangles. So this is the first flat trial. And then this is now
with the lampshades. I actually took the screenshot
from the documentary film, and I then built it. The pattern based on that one. Basically, I could not find
like this pattern online. So I just took it
from the documentary. And I just built these mountain and
valley curves as well. And the surfaces obviously, if I turn off the image, then we get this pattern. And we get now this result that we see
in the documentary film. And let's go to this one. So this is now a lamp shade inspired by the
eggs are triangles. Byron rash. And here I had to, not, well, I had to exclude these. Let's check these ones, these corner surfaces here. Because otherwise
it would not really work as a transition from
this plane to this plane. These two planes. And that's why this
interesting result. We get with these corners, with the OLS being in them. So it's something actually
that is unusual and kind of knew within this
branch of lampshades. And now this as well, the hexagons and triangles. It's called hexokinase
and triangles because it's based on hexagons that have
in-between triangles. And then we get these folds. This is here a trial based on
the hexagons and triangles. But you can see that
it's not really working and becomes worked. Spider on distillation is
really interesting example. And what is interesting
about this one is that it does not
have straight lines. It does not have straight
mountain or valley curves. So these are curvy. And this is the image on which
the base pattern is based. So these are now surfaces. And I also added these curves based on the image as a perfect
replication of the image. And as a result, we get this. These are like the
mesh wire lines. So this is the spider
and desolation. And we have the last, but not least, eric geared the inspiratory gummies
with three variants. This one is called eight
dot-dot-dot for flagstone. And the second one
is called Cairo, based on this pattern. So these are not
really lampshades, but just experimentations,
experimental patterns. And the last one is called
the decagon flagstone. It's like a flower
based inspired pattern. And to make it more interesting, I made a big flat pattern trial. Like this. These layers show the further or continued
folding reaching these results. So from here to here to here. Alright, so basically these are the origami experimentations
that I wanted to show you. As I said, these are
inspirations based on specific patterns as a
starting point which we can change or
refine or adapt to whatever shape or design
that we want to achieve. What is interesting about
these experimentations is the potential of using Kangaroo to simulate
origami patterns. And for the last ones, we saw that we used images
of patterns as a start. And then based on these ones, I built the kangaroo
definitions to reach the final origami lampshades
and experimentations. Thank you very much
for your presence and see you at the next unit.
27. Particles 2D Shape Collision: Welcome to unit eight class. In this unit we're
going to explore new methods including
solid collision, packing, wind, and
other effects. Okay? So this is the unit eight file. And we have here the
particles 2D shape collision, 3D shape collision, part one, onto part three, then
packing wind and drip. Okay, let's put this here and
split the screen in half. So for the first part, which is about particles
2D shape collision, which means trying to
simulate a collision between particles or
points and a 2D shape, which is usually a
curve or a polyline. So first of all, here we can see we have in Rhino the layers that I
have already prepared and organized for each exercise. For the first one here, if I click on this one, we have here two layers, the points and the curves. We have one curve. And basically the idea here is that we're
going to simulate a collision between these
points and this curve. So what if, let's
say these points are falling down and
touching the curve? The curve would actually prevent them from
continuing falling down. And that would just dressed. They will, they will
actually rest on the curve. So how can this
effect be simulated? So we need the curve here. Here are the 2D shape, the curve and the points
of the particles. And something to
also have in mind. Like a background.
While I'm explaining, is that in real life, as small as you can
go with particles that are going to be or
end up being spheres. I mean, if we go into
the atomic scale, they will be considered as fears and not absolute
points, right? So we have to also bear
this in mind that in real life they're not
gonna be pure points, but actually spheres
or bolts basically. So let's say now we want to play with spheres
and not zero points. Although kangaroo
here is simulating the effect with
particles with points. So how can we now knowing this and are actually dealing with
the spheres are not points. How to translate this
idea to kangaroo in its own terms as it only
knows about particles. So is there a certain workaround in order to make it work for us? So let's start with the
components of the recipe. So first, here we need
to use this curve point collide component coming from kangaroo two from
these goals here. So it is curve point glide, which needs points to be
colliding with a curve. This is the curve input.
For the plane here. I'm keeping it empty. And for this one, I'm saying
it's now set to true. If false points would be
kept outside the curve. If true, they will
be kept inside. I will try now to
test this and see the difference and
this strength. I'll also try to play
with this and see if it affects how it actually
affects the simulation. So first of all, if the
curve point collide, we need the spherical light. So as I said before, these points in real life are actually spheres
are not points. So we need to translate
this idea to kangaroo. And this is the component
that actually does that it translates this idea into a tangible scenario,
so to speak. It is an inter sphere collision. So if two particles touch
each other than they will have to collide and
not just touch and overlap. And then keep going as if nothing happened or as if
they don't have any radius. Let's say they
will have to have, they'll actually have to
collide with each other. And this returns. Now here, we need the
centers of these spheres. And this is the radius input. It's only one value for all of the radii and the strength
of the collision. So that's the second one. And third one is the load
similar to real-life scenario, where we have
gravitational forces pushing it this
fierce downwards. So we need to also apply a
load to all of the points. Alright? With vector Z pushing
downwards as an option, or actually two
options we can grab. So after the simulation. Once we have the
converged result, then we can try to move
these fears around and see their behavior with
the grep component. And on blame. Bear in mind this is optional. You can use it, you're going
to have to use it actually. But for now, because the points are already placed in this
weight, placed in the x, z plane, this one. So the small representation of the plane shows
us that you are in the x and the z plane. I can even quickly draw it here. Just to show you quickly the
graphical representation of it. Top view. So extrude the line. So this is the plane. If I move this, I
mean this corner at the origin to be really
like the real x z plane. So this illustrates graphically
the x z plane. All right? We could have been working with the x y plane or the
y z plane, right? That's also possible. But for now, I'm working
with the x z plane. So we can actually
use this component. It maintains the points
on a certain given plane. That's what it
does. As an option. The effect works without it. You can also use it if
we wanted to say to guarantee that the points
won't go outside of the plane. Although I don't think they
will go outside of the plane. So supposedly they will stay, they will remain in the
initial plane in any case. So we have the curve
point collide, we have this frequent light. And for the inputs here, the radius input with
this number slider, I'm not a big
value, small value. And I'm also going to hear turn on just to see how they
look like at the beginning. It is important to
know that these fears, we cannot really use them as direct elements for the
simulation because all of the inputs or most
of the inputs of the components of
kangaroo actually require points and not spheres. That's why I was
saying that we need to consider that kangaroo understands
inputs with particles. And then we need to
translate the situation of spheres and not points
with radii and geometry. So bear that in mind that
we will only have these as a preview of where they
are now and later on. So here we have the points. All of the actual
components merge together. After the simulation, the
output V for the vertices, Then we can hear it was
another sphere component and use the same radius that was
given here for the spheres. And the sphere collide. The inter sphere collision
also give the same value to the radius input
of the output of the vertices to make
new spheres and then see the results there. So now to launch the simulation,
the spheres are there. Okay? Let's first see
how the simulation would behave and then try to check different options
for the components. If I turn this to
true, it does this. If I reset it.
Okay, So they fall down quickly and they collide with the curve as
well as with each other. Now, we're saying here to test what happens
if this was false. So they will just go down
as if there was no curve. Now understand what
this means when it says if false points will
be kept outside the curve, and if true there
will be kept inside. So by outside and inside, it means on curve as if they are resting or should they
resting place is the curve. And that would actually
let us think, okay, if we don't use a load, what would happen if I disconnect
the load for a second? Totally not even giving get a zero because here it was given a small negative
value just to tell it to push it downwards
in the minus z-direction. But what if we don't
use the load at all? And you reset? You see, so it does that. It does not, well, there is no load anymore. So basically it pulls
towards the curve. Now if I play with this, so here play with these
two are actually, we'll change it to three
sliders and check the results. Okay, let's keep this on. And if we go to zero
here and reset, okay, So nothing happens. So if this curve point
collide is set to zero, this is set at a certain value. Now, these are in the
resting position. They don't collide
with each other. So if we increase the radius, for instance, you see
that now we collide. So this is the
beginning position. If I do this, you see that
only this one is working. The sphere collide. This is not happening
because I'm not giving, actually I'm giving it a
zero and there is no load. If I give it a load,
they will go down. But there's not working
because it's at zero. Okay? I will reset it. Let's turn the starting ones on. So these two will collide with each other
and then move away. And all of them will go down following the
load component effect. And they will not
collide with the curve. You see these moves away
and then move down anyway. So that's why if we
activate a curve collide, they will go back to this one. If we give it a higher value. So they're colliding
with the curve. Now, you see that when
we play with this, you see its effect. How these are behaving. If we increase the negative
strength of the load, the behavior becomes stronger. If we decrease the
negative value like minus zero, that's 01. Let's see. They bounce a bit more. Then they go into this
position going downwards with the weight being applied
to them. Like this. Now, if I zoom in on them a bit, and let's check the
spherical light component. If we change this
value itself to zero. You see they will not
collide with each other. If I give it one. They will behave like this. You see they are slightly colliding because
it's a low value. And if we make this higher, you see they push outwards more. Let's make this a real number. And I'll make it like a0.01. For instance. You see, so the force of collision
is really weak. You see? And then as we increase it, they are pushing more
against each other. Maybe a value of ten could
be like a guaranteed value. In this case. Preventing
the collision. I mean, they won't
actually overlap, they will collide and deed. So this is now the first step. The first way of colliding
particles with a 2D shape. And we've have seen that
playing with these components, what we can get as behavior
if we use the Grab. Now after it's still running, it's saying that
it's still running. But in any case, let's check. If we turn this off. So here we can grab them. We can play with them
with the grab components. Alright, so this is
the first step for the particles and
2D shape collision. Now let's check out the particles
and 3D shape collision. Let's disable this
part during this off. And this one as well.
28. Particles 3D Shape Collision Part 1: Okay. And turn this on. So in this case now, I will enable fees. Okay? So in this case, what we are doing is to collide these spheres
with this box. And now it's not
anymore a curve. And they are not anymore
planar in one x z plane. But they are in a x, y plane. There are planar and
then they will fall down and it will hit the box. And then we're going to see the collision simulator there. For this, if I drag
this to the side. So we need the B rep as the box. I have already constructed
this box, this one. And the points population curve, which means it's
only this curve. And what I have done is that I use this one I made populate 2D. So if I click on this, we have now these points and these out of these
points, I made spheres. Basically, that's one way of
building an array or a group of points quickly with the
papillae 2D component. And that's it. I'm going to turn
this off. Alright? And this is our box. Now, what we need for this
one is a solid point collide. Remember here we had the
curve point collide. Now it's a solid
point collide coming again from here. Kangaroo. The same subtype goals. This one. We need a sphere collide again, the same interests
field collision. So this is the same as this one. Sphere collide. We need a load and they grab. The only difference
in this case, to convert the effect into a 3D effect is this
solid point collide. Again, you understand that a false points will be
kept outside the solid. If true, they will
be kept inside. So let's see here, it looks like it's going to be
kind of inverted. Also change this to three. So this is the beginning. We'll keep the BI rep on. All of these ones. Keep them on. Alright? Now, if we keep these
ones off for now, keep only this one on. Alright. So important, if these fears or not already
touching each other, colliding with each other, they will only move
down and stays too. Let's check this out. If these fears are not touching, which means if they
are small, right? So let's say they
are small like this. Okay, starting with
this situation. And we run the simulation, they will do this. That's it. And so here, previously, in the previous example, we saw that this needs
to be true as the input. So if false points would
be kept outside the curve, if true, they will
be kept inside. And we said that we
want to keep them on the curve. So true. But in this case, it's
actually the opposite. So let's check the
explanation out. If false points will be
kept outside the solid. If true, they will
be kept inside. So this means that if true, there'll be kept
inside the solid. But I want them to be
outside of the solid. Now you see that if I do
this in the middle of the simulation, it won't work. You see in the beginning of the simulation
after we run it. Now in the beginning
with the middle of it. If I say true. So make them inside. They will keep going and
then gets stuck inside. If we change it again and
we change them to outside, then they won't go back
outside from there. But they will actually
keep going downwards. Like that until infinity. That's why always in kangaroo, if you are changing the inputs, be careful about the results. Because if we find out that
the true is the correct one, and then they disappear,
Where are they? Related needs to be resected. So just reset and
change this to false. So recently again,
the inputs here. Okay? So now this
is working well. I would say, well half working. Why? Because although there
are colliding with the box, but normally we would not expect them to go
halfway into the box. But they would sit on the box on the surface of the box
and not like this, right? That's how we would
expect them to behave. And so we can have a workaround. And this workaround
will be to push them upwards by
the radius value. So if I use the radius
value that was given for these fears and the
sphere collider input. And so with the, with these spheres here, we can use the move and
turn this preview off. And now they are
resting, as you are, would actually expect
them to behave on this external surface
of the box like this. I'm actually in a
ghosted view mode. So I can also see through
from this side in any case. So now we're having this effect. We have to do this work
around after the output, once the result is done, and then move them in the z-direction with
the radius value. Alright, so I said here that if these fears were not
already touching each other, colliding with each other, they would only move
downwards and stays still. But what if they were touching? They were colliding from the beginning,
what would happen? So I will actually stop it, reset, and I will make
them a bit bigger. Let's try to increase the radius until they start to
touch each other. Something like this. So now they are
touching each other. And for now, we'll keep
this for the moment off. And keep this on. Alright? So even like someone outside the box and
kept falling down, like in real life, if
we have this situation, they would most likely
go outside of the box. And there are still going down like so they touch,
they collide. They got pushed out as a
result of the collision. And when outside of the box. And these are moving around as we would expect them to do. If we bring this to four, I think they would
still collide. Let's see if we run
this simulation again. Yes, they still collide
among each other. And the dome fall
down and stand still, but they go down and then they collide and they
move around a bit. Let's make this
even higher without having disputes to
go outside the box. 4.3, let's say hopefully
that they won't go outside of the box. Okay? Now I can again turn this, move upwards with the radius in the z-direction so that now
they would sit on the box. As we would expect them to do. However, it looks like there's
something still strange. Some spheres seem to
be touching the box, kind of overlapping
with the box. Not correctly colliding
on this side, e.g. and so the workaround, this movement of the sphere
upwards with a radius value. Just solve this issue. If I turn this on again, let's take a look here. This issue of not having
them to do this, right? So I turn this on again. And now there are
good like this, but some are not
looking, correct. You know, quote unquote. They don't seem to be
behaving correctly. They're not really colliding
with this side of the box. So observation, you
can see that although these spheres are
falling down and successfully not colliding
with each other, some seem to collide
with the solid box. Actually something
to not collide. So I would say seem to overlap with the
solid boxes walls. Right? This is happening because
there is no component affecting the collision between
the box and the spheres, but only between the
box and the particles. In order to solve this problem, we need to add another
component that simulates or prevents,
actually, yeah, I would say simulates, simulates the collision
between two solids, box and Spheres, not
the box and particles. Remember that here because
the components are simulating the collision between
particles and solid, between points and a solid. Or here the blue wrap
the box that all of these input points that in the
end here we would have to, we had to use this move up in the z-direction using
the radius value in order to make them look
like, like this, right? This view. But from this side, this is not solved yet. And so actually the problem is deeper and we need to try to make collision between box and spheres and
not Box and particles.
29. Particles 3D Shape Collision Part 2: Let's see now how
we can actually solve this problem with
another workaround. I will allow disable these, turn this off, and
we'll turn this on. So basically this work
around instead of using or actually moving these fears upwards or
trying to move them and decides to account for
what we have seen. The issue with not
colliding with the walls. I would actually do the work
around with the box itself. What if the box was
actually smaller than this box that
we're seeing now. And we have the collision being simulated with the smaller
one that we don't see. And then it would
look like as if these are touching
this one, right? So instead of moving
the spheres away from the box by the radius value, what if we could actually invert this statement
by actually offsetting the box by the
spheres radius value. So that the box becomes
smaller in a way. And it will look like with the bigger ones as if
it's working correctly. So let's try to see
how we can do that. So here we have the box. Okay? And what I would like to do now is I want to offset it. This one to make this interior area
smaller for the spheres. I turn this off. And now we have this
relation happening here. One thing we would ask
why I'm offsetting the box by 6.932 and
y naught by four. Well, because I've
tried this out before, it looks like if I
do this by four, it will not give the
correct offset value. So if I turn this on, so this is the original one. This is the new offset one. If I tried to make a
quick distance check by I it looks like the distance offset
it here around 2.3. And that's why I figured this
would be the value for it. So 6.932 in this case, if we check the distance
now, it's around four. So that's what the
offsetted new box we need. And it's a bit strange why it
doesn't work with this one. I didn't get solution or a
good explanation about that. I even tried to use
the thicken if we try the mesh thicken
from weaver bird. So this is the mesh. So this is the box. And I do this. Sometimes strange things happen, but I couldn't find the
explanation for that. If I give it a value of four. And let's check. It looks like the same result as the one that's
happening here. By the way, this components
coming from puffer fish. I'm using this puffer fish plug-in offset mesh
to do the offset. And it's an interesting
result that we're getting and not exactly
the correct for dimension. So again, if I tried to quickly
check the distance by eye without snapping
anything to 0.24. It's really not correct. However, if we actually offset, if we offset the box
or not the mesh, but if we offset surface this original beer app,
it would actually work. So if we do that and then we offset this
distance by four, we have a lot of things
above each other. Preview off these ones. Alright, so now this
new offset that result from the B
wrap, this one. This looks like it's correct. Let's check the distance
around for this, correct. I don't know why meshes
that doesn't really work. However, I cannot
really use this one. In this case, actually tried it and it didn't really work. This is not considered as one mesh because
we have many reps. When we miss them and
join them together, it doesn't really
work as we want it to work like this result. So I want exactly only one box. Turn this off. Only one box like this. That's what I want. But the offset
surface is offsetting every single surface
of the B or AB. Thus make multiple boxes, which is not what you want. So be careful about that. In any case, this is
not a kangaroo issue, but more a grasshopper or
actually a rhino problem. I figured that this value would give the closest value to be for as a final value,
the four offset. And so please be careful
about this later on. If you want to make
a mesh offset with a specific distance,
double-check it. And even if it
seems it's working, it's not giving any
error messages. It might not actually be the case that it's
actually working, but it may be
actually not working. So always keep that in mind. Alright, so in any case,
this is now the box that is now bigger in terms
of the outer volume. But this area here, this one is smaller. So these walls are pushing to the inside by the value of four, which is actually the
radius of the spheres. Now, doing exactly what
we have done here. So nothing changed
from this side here. I only added this
offset mesh here. And I now run the simulation. I will get this result here. Now you see that some are doing this overlap which is
actually expected. However, this is not the
original box, right? Remember, this is only the
offset To do the workaround. Now, if I turn this off
and I turn this on, now, it would work correctly. Now there are actually behaving as you would expect
them to behave, to collide with the boxes walls. And now even here, remember this work around
that we did before. I did not delete them.
I intentionally kept them and put Xs over them. So no need for this boost
simulation operation as the offset mesh box solves
it. That's what's happening. Because the offset is
in all directions. If I go back to this view and I turn this offsetted mesh on, it is offsetting in
this direction of the walls and also
the surface upwards. The floor here of
this area is also offsetting upwards by four. And so that's why now
this is being solved. So we don't need anymore to move the spheres after
the simulation. After this folder is output. Alright? So I will turn this off. This is just a small workaround
before this simulation. The simulation with the box, not with the spheres to make the effect working correctly.
30. Particles 3D Shape Collision Part 3: Okay, Now one thing
that we need to know is that in the current
Kangaroo to plug-in, there is actually a
missing component that should make a collision or a simulation of a
collision of spheres that have varying radii
and a box or a mesh. This is important to know. And here actually
like added the note. So important. This solution with the
offset at mesh box works only when all spheres
have the same radius. In case there are
different radii, then you would need to use the collider component instead
of the sphere collide. The solution to the right, part three is inspired by Daniel bikers
proposed definition. This is the link to the page. It is here. This is
the simulation of a collision between
multiple spheres with different
radii and the mesh. And here he says that he
explains what's going on. And by the way, this is
also the link to the file. If you want to download it, I actually put it for you here. Under Part three. Here's the phi content. So this is the original file. This solution is inspired by Daniel packers definition
or proposed definition. And it is there as
a reference source. So what he says here
is, I realized though, that there wasn't really
anything in there for collisions between spheres of
different radii and meshes. You could do it by offsetting the mesh for
each different radius. But that would be rather slow. So I put together a
new goal for this. So a new component which is
actually not in kangaroo too, but actually inside
of this file. I will show you soon
this new component. You will need to set the
assembly reference location. Okay? So the new goal is a
C-sharp solution component. So if I enable these and
we'll now disable these. So now it's making
a collision between different radii
spheres with the mesh. So this offset mesh, There's not actually
needed anymore. Because the workaround will, will actually do it, will do the trick without
having to do this. Alright. Just make this a bit bigger. Okay, here we have the B-Raf, the box, the mesh. And this new component, which I believe would be part of the next kangaroo version,
sphere mesh collide. And this is now currently
a C-sharp component. It is not yet a
kangaroo component. Alright, so collision with box, there's not yet a
component in kangaroo. If you double-click on it, this is the code
of the component. Alright? And here the input. So for the mesh, I would rename it solid for you to later on
understand the inputs, radii and strength there. So you see it's
really high and not one radius, but multiple radii. So the first step is
the collision with box solid and points with radii. We also have these points
where the collider. So also the second thing that is different is not anymore. The sphere collide, but collider coming from kangaroo under
goals, collision collider. And again, because we have now different radii of
spheres that we need this inter sphere
collision to happen between these spheres of
different radii, right? So this is the second part, the anthrosphere collision, then the load and
the Grab option. Alright? And for the different
radii spheres here, we can actually do this. So you see this, we can, from popular 2D, these points
I'm using here a list item. So how many do we have here? We have 20 and I'm using
a random component. And then I'm constructing
a domain between these two values and then connecting it with
the range input. And this will just
randomly make values, 20 values that are in-between. These two values, these
two extremities or bouts. That's what's doing. We can change this later on and just a variation of the radii
of the spheres later on. For now this is between
these two values. We can actually make this, let's say a bit, maybe bigger and the
smaller, the minimum. So these are the spheres. Again, we cannot use these
directly when the components, but only the value of the radii and the
coins. These ones. And now let's look at this. If I now launch it. Okay, I'm making this ready. And through someone outside. If I actually make this smaller, let's say six and reset. Alright, one went
out, It's fine. Now it's working
correctly without even needing to do any work around. So this is the cool thing about this is that now we can use this sphere mesh
collide component. This new one, which is still not in the official kangaroo, but most likely part
of the next one. And this will now do the job
for different radii spheres. And please don't
forget that this is inspired by Daniel
Parker solution. And you also can find
the online link to it. Here. You can download the
file from this link. And as we're now looking at it, this is a quick run of it. This is the simulation we
saw previously online. This is the animation here and the website based on this one. Alright. So I'm going to disable
this and also this one. And now let's go to packing
circles on surface.
31. Packing Circles on Surface: And this one is rather
a simple definition. But it has a really
interesting effects, especially with
packing circles on a surface and not
only flat surfaces, but also curvy surfaces. I will show you what
I mean by the soon. Here we have the layer
packing circles on surface. And what I've done
here is first, I built a surface, a quick surface like this. Then it turned on the
control points here. And here, like this. Then had to rebuild the surface. Turned on the points again. And I moved a few points
from inside up and down just to give them all
the surfaces small bumpiness. That's it. So that's how
I reached this surface. This is a quick review of this. And then I drew a closed curve
like this, a planar one. And I used a trim command. So if I copy this on the side, we go to top view. We make this ghosted type trim. This is the cutting
curve like this, and now we have
the final surface. So I want now to
work with this one. Alright, so this is now
the trimmed result. This is what we
want to work with. We want to pack circles
onto the surface. Okay? So now move this there. Alright. And I will enable these. So first, this is the
surface referenced here. And I'm just doing a
populate geometry. It is actually
similar to depopulate to D that we saw before here. But now it's populated geometry which works with surfaces. Let's turn this on. So this is the count
of the points, okay? And you see that population
of the points is randomized. Whenever we have a CD-ROM put, it means that the component is working with randomization. And so basically they
are scattered on the surface without any
order. Just randomly. I can play with these. I can now play with
this, scatter the doubt. And we need here only two main components
they grab is optional. Now the first one
is the unmatched. So we want to keep these points
on the mesh so unmatched. Second one is fear collision. So this is the spherical
light component that we saw previously
with the particles. And this will make
a sphere around every single point
and then simulate the collisions
among the spheres. Here. All of these circles are going to have the same radius for now. This is the first part which is preparing
these components. If I click on this now, the output is going
to be zero points. Now, if I make a sphere out
of every single one of these, it freezes a bit. It looks like. And then
I give a radius value. This now to this. So now this means that these are the spheres that will
be simulated soon. But remember, I want to have
circles on the surface. I'm going to show you
later after this how we can do that with this step here. So I will now turn this one off. And I will now run
this simulation again. You see that because we're
trying to preview spheres, there is freezing and
the simulation is slow because we're
dealing with lots of spheres and not circles. If I tried to orbit in 3D, I'm not actually able to do that because
it's still freezing. After a few minutes, I was able to turn
this off false. So please don't use fears
as it would just freeze or definition. But in any case. So we want to pack
circles on this surface. We have these points and then we get the
vertices outputs here. And then if I change
this to true, you see this is the simulation. But we said don't see the
circles on the surface, so we need to make
circles out of these points to be
normal. Do the surface. Alright. So in this case, we use
this component first, the surface closest point. And the input of the surface
is the surface itself. And put forward the
point is the vertices. We only need this component
to give the UV point of every single point
with which we're going to do and
evaluate surface. This surface with all of these points with their
respective UV values. And then the output frame. So the base frame of
every single point onto that surface that is normal to the surface on each
point's location. So if I turn this on, actually, you see all
of these planes now. These are the normal planes on the surface at
every single point. And then we use
these base planes to the tuple to be the
planes of the circles. So every single circle
will not be along the x, y plane, but along these planes will
turn this off and on. And now we have the circles. So now the circles
are on the surface. And what is interesting now is because we
have the grab on. We can go here in the viewport and click
and move circles around. We can adjust the
result if you want. Like that. Just play with them. We'll turn this one off. Only keep the result. Now, something to be aware of. If we turn the strength of
the sphere collide too high, it will not give us like
a homogeneous result. In other words, if I bump
this too high and if we have more circles like this, alright, let's say 400, but will not look
kind of nice in a way or like a clean result. If we take this
back down to one, round one, it will look better and more
homogeneous result. And of course, if we play with the number of the
circles and re-run. Now, nothing happened
because these are not colliding with each other. We don't have enough circles. If we bump the number up, then start the simulation. And of course, the radius. Let's play with it, as well, as well as the count. So it becomes a nice
interactive simulation. So this is basically backing circles on a
non planar surface. I just wanted to say
that we can also packed circles on
a flat surface. However, this example
shows the more extreme or let's say more
challenging situation. And we can even use this type
of simulation if you were, let's say, simulating a layout of tables and the restaurant. Or if we have a certain pattern, like an urban pattern of
buildings or something. Or we can actually use this
trick to try to simulate how would we get the spacing of
different elements may be furniture elements, maybe on an urban scale, like patterning or spacing of buildings or blocks
with this simple method. And even like structurally. So it really depends
on what you are, what you have as an
end goal and how you'd like to use this definition
to meet your goal. I'm going to disable this and enable this part
about the wind.
32. Wind Simulation: So yes, in Kangaroo, we can actually simulate wind like they wouldn't
effect on geometries. And here, I'm going to do this. So for the wind, we only have this
surface that I've built inside of rhino
referenced here. And I turn this off. So first of all, we need to turn the surface into a mesh surface. For the UV count. I'm using 15 for
both u and v inputs. I need the show
component because I would like to see the
mesh on the output. I need to use the edge lengths because I want to
maintain the mesh net. So the length of the
interior edges of the mesh. And I need to use a width
component from kangaroo. Two, goals, mesh, wind. And in this case here, the one is affecting a flag. So I need to use anchor points to anchor
points to anchor the flag. And vertex loads because
in real life scenarios, we would have the gravity. So when there is no wind, the flag would just hang down. And then when there is wind, it will just blow on the flag and then make
it move with the wind. So from the surface, what I'm doing here is I'm
using a deconstruct, be rep. I am extracting the points, this one and this one. And I'm moving this
one downwards, making a line in
between and then making pipe as a 3D representation
of the rod, not the flag. This is a graphical step. It has no impact on the
simulation process itself. And then these two points, here, I'm using them as
anchor points. Alright? Without any targets,
so the flag will not move the mesh surface. We have this one, the edge lengths with
the strength value. Also using the same
mesh for the wind. And the vertex loads
applied also to the mesh. Okay, so first things first, I would like to
show you first if I use a unit x-direction
for the vector. So this w input is
the wind vector, the direction and
strength of the wind. Alright, since this is
now along the x axis, how do you think this
relation would behave? How do you think
the window would affect the flag if
I turn this on? So we have this pipe on
and we have the output here with the mesh on here. And if I click on true, it will just to this. So we have only the vertex
loads affecting the flag, but without any wind effect. Although we have is
strength value here. But it doesn't seem to affect
the mesh surface, the flag. And that's because it's
going along this direction. This one, since the mesh surface of the flag has no thickness, the wind is unable to see it, quote unquote,
therefore affecting it. And that's why it is
not doing anything. If I now use the y vector
direction, Now it works. And if I change this
back to the x-direction, it will push it back to the x-direction and then keep going. If I turn this back down, Let's say to one, maybe even less than one. Now, simulating a gentle wind. And if I turn this to zero, oh sorry, if I turn this
to zero, not minus one. As if there are no loads
pushing down. If I rerun. So I get a really small value
just to be more realistic. And I bombed the
slightly higher. Alright. So this is the wind effect. Applying it on a flag. We can apply it to any
mesh that we want. Alright, so I'm going to
now stop the simulation. Okay? I will disable this.
33. Drape Simulation: And the last but not
least, drape effect. I will enable these. Okay? Under the drape layer, here we have the drape surface. This is the surface, and here we have three layers. So we have the cube, we have this fear, and we have a torus. And let's see how the simulation with a B
would actually behave with each of these solids
being used as inputs. So basically for the drip, there is no specific
draped component. But we need to combine three components together to
give the effect of a drape. So we have the mesh surface, then we need to maintain the
lengths of the mesh wire. The first step. So this is maintaining it the
edges of the mesh. We need to give a solid point. Collide. This one for
the points of the mesh. So you would need to
have to imagine that rape is colliding
with the solid. So it's resting on a solid. For this, we need to
use this component. The solid point collide. And all of the points of the mesh will be
colliding with the solids and play with these ones here. So here we have the box first, then this fear and the tourists. And we need a vertex loads to push the mesh
down onto the solid. And as an optional input, we can use floor. This defines a base
plane collision, preventing the drape
from going beyond it. I will show you what
happens when we use it. And finally, the grab as an optional component as well to play with the output resultant. Alright, I'm going to
first choose the cube. We'll turn this on. Alright? As the solid with which all of the vertices of the
mesh will collide with. So now we get this
result with the cube. We see that we did
not use a floor. If we use the floor now, it would snap upwards. It's only affected the
simulation instantaneously. If we start the simulation when the floor being part of it. It will do this like that. And here for the floor, it is using the x, y plane as the default plane. So let's keep this
as it is for now. So this is now with the box. If I turn now this off and I turn the sphere on and I
use it instead. We run it. So now we have this result
and if we don't have a floor, we get this result. So the mesh is draping onto the sphere and you
see that it's kind of like sliding off and fall
down to infinity slowly. Or we can use the tourists. So turn this off. Let's turn this on and use the
torus if you aren't rerun, falling down on it and
also slightly sliding. I was ready to save
it and use the graph, but not really helping. And it's also falling downwards. And if it's negative z, alright? So if I connect the floor again, it will just like snap super-fast upwards.
Okay, reset it. Going back now.
Resetting the floor on. So this is more
realistic effect. Adding the drape resting on
the torus, on the floor. And you can of course, play with this by
dragging or grabbing the mesh with the
grab component on. We can try to grab this
to the center, maybe. So we can do this as well. It's not really reacting quickly because it's trying to
simulate the grabbing action. And even when we tried to orbit, it does not orbit directly
while wrapping something. So yeah, just keep that
in mind in any case. So yeah, that's it. There is no draping
component, quote-unquote. But you can actually build the dripping effect
with these components. The length of the
lines of the mesh, maintaining the solid point. A collision and
the vertex loads. The floor is optional of course.
 Wassef Dabboussi
Wassef Dabboussi